
Figure 3.
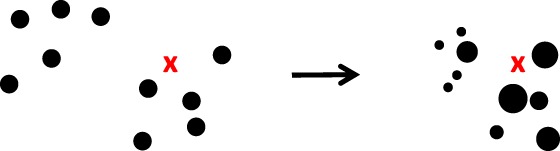
The typical proposal‐density particle filter. Left: the prior particles at time n − 1 (dots), with one observation, denoted by the red cross. Right: the posterior particles at time n, the larger the dot the larger its weight. Note that the particles do move in state space compared to a pure model propagation over one time step, and their weight contains contributions from the likelihood and from that movement [Colour figure can be viewed at wileyonlinelibrary.com]