
Fig. 9.
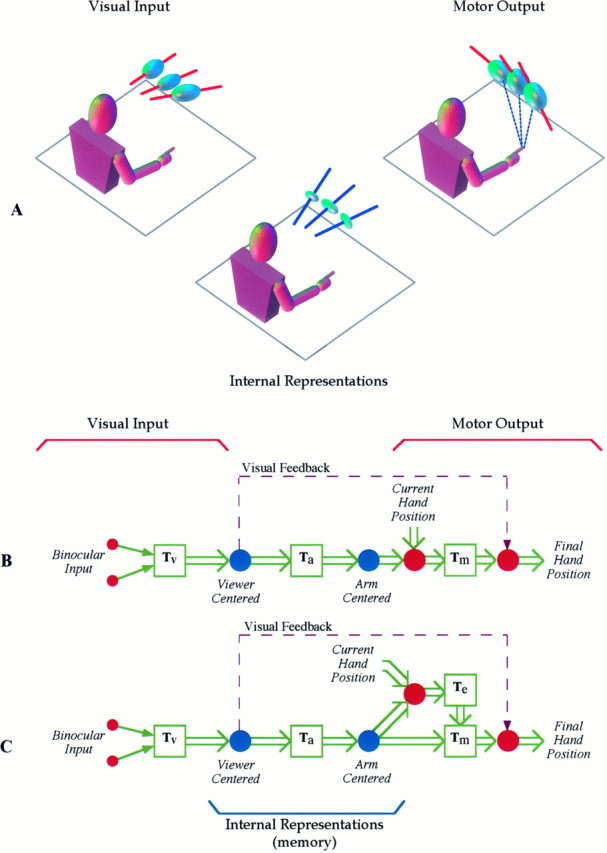
Summary of results regarding the sensorimotor chain for pointing to remembered targets. A, Viewer-centered visual inputs are passed through internal transformations that compress the target position along a body-centered axis as a function of memory delay and then transformed into a motor command. Ellipsoids marked with red bars indicate variable errors, for which the red bar indicates the direction of maximum variability. Ellipsoids marked with blue bars indicate estimates of local distortion, and the corresponding axis of maximum contraction. B, C, In the schematic diagrams of the sensorimotor processes used in pointing to remembered targets, circles depict data representations within a specific reference frame, whereas squaresindicate transformations between coordinate systems. Two models can capture the observed behavior. In both models, binocular visual inputs are transformed into a viewer-centered visual reference frame, with contraction of data along the sight line. Data are then transformed into a motor reference frame linked to the effector arm, with additional contraction along a shoulder-centered axis. InB the final output stage includes a distortionless transformation through a hand-centered reference frame. InC, a parallel, dynamic component is added to the remembered endpoint position to generate the final motor command. In both cases, if vision of the hand is permitted during the pointing movement, the observed final finger position is compared with the visual memory of the target to reduce errors at the output.