
Fig. 1.
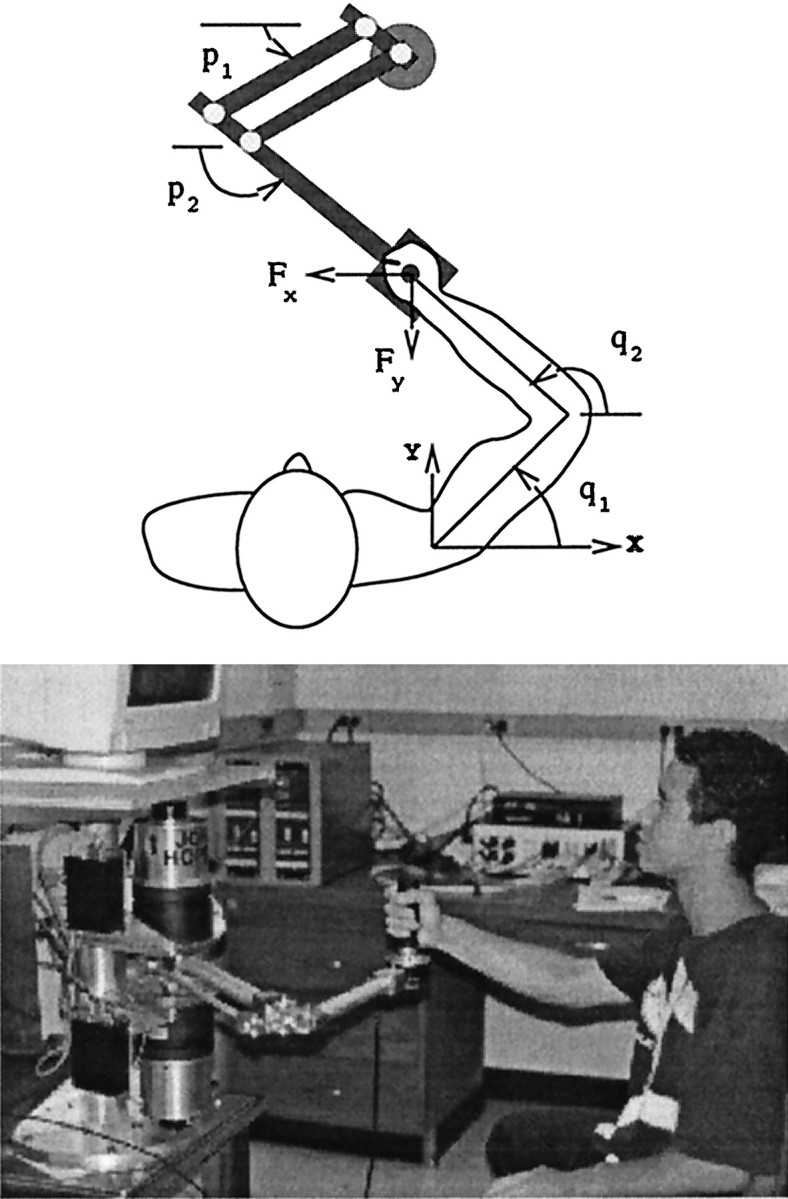
The robot manipulandum and the experimental setup. The manipulandum is a very low-friction, planar mechanism powered by two high-performance torque motors. The subject grips the handle of the robot. The handle houses a force transducer. The video monitor facing the subject displays a cursor corresponding to the position of the handle. A target position is displayed, and the subject makes a reaching movement. With practice, the subject learns to compensate for the forces produced by the robot.