
Fig. 2.
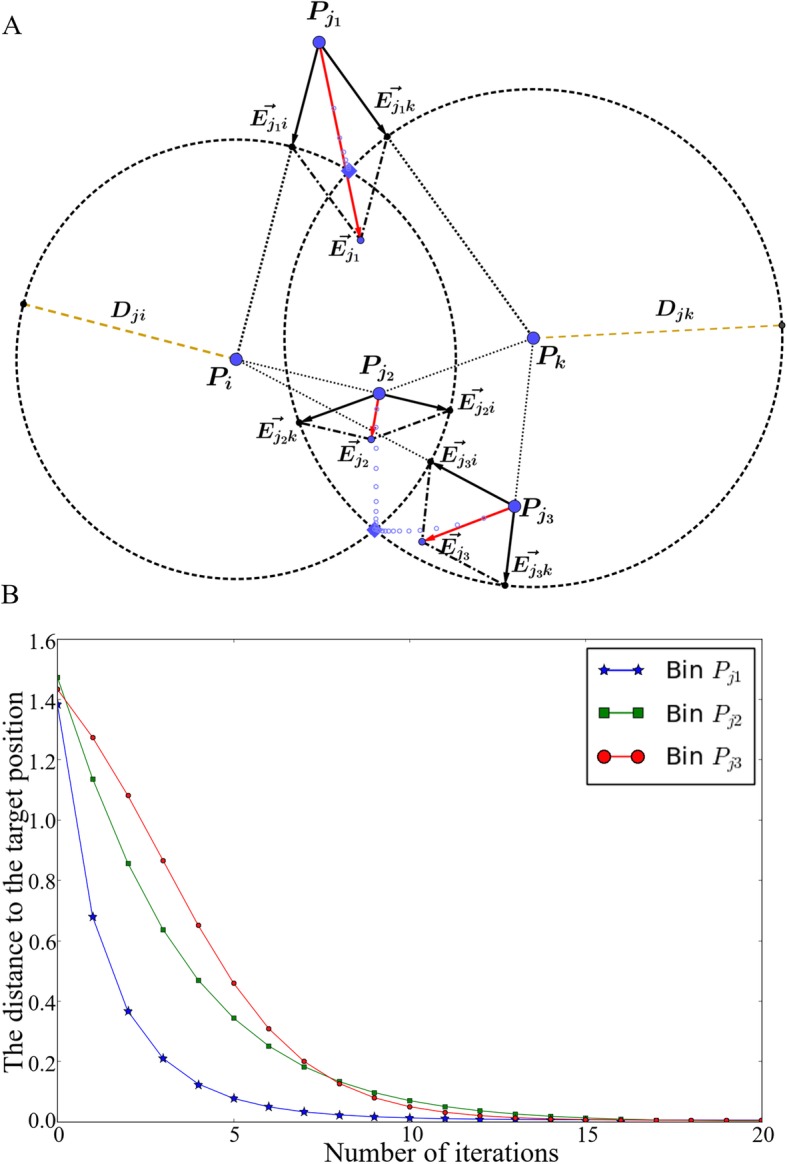
EVR calculation. a Illustration of error-vectors and error-vector resultants. Pj1, Pj2, and Pj3 are 3 bins whose positions (coordinates) need to be adjusted; Pi and Pk are 2 bins whose positions are fixed; Dij and Djk are the expected distances between these 3 bins to bins Pi and Pk; the intersection points of the two dotted circles (centered at Pi and Pk with radii Dij and Djk, respectively) are the target positions of the 3 bins Pj1, Pj2, and Pj3; the closest intersection point is chosen as the target position for each of the 3 bins. b The distances between the 3 bins Pj1, Pj2, Pj3 to their target positions decrease during iteration