
Figure 1.
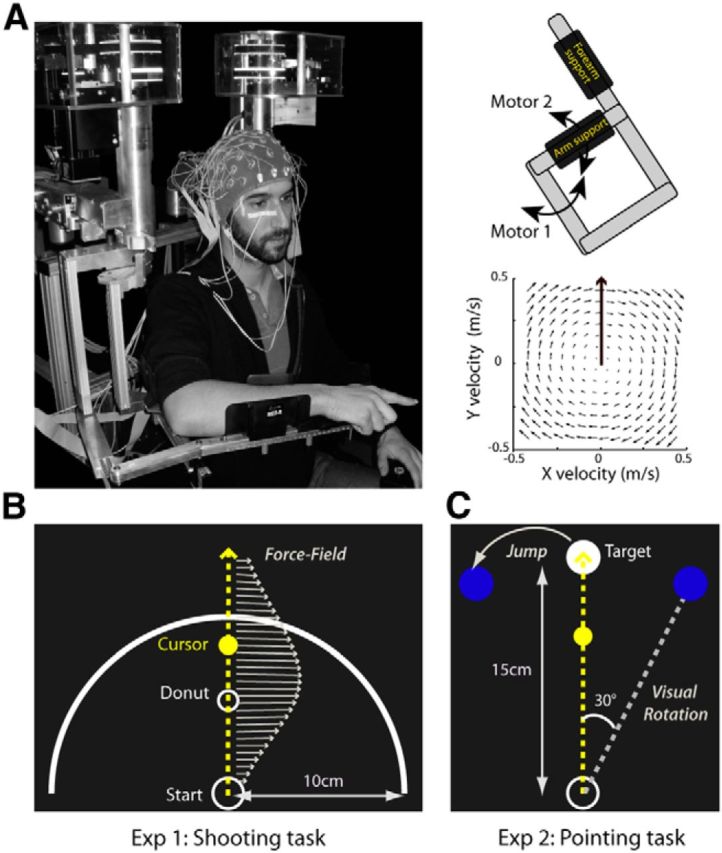
Experimental setup. A, For both experiments, EEG was recorded from participants performing reaching movements while installed in a robotic exoskeleton (left) that can apply mechanical loads to the shoulder and elbow joints through two torque motors (top right). In force-field catch trials, the robot was programmed to create a viscous curl field in which forces were proportional and acted perpendicularly to the velocity of the hand (bottom right). B, In Experiment 1, participants performed a “shooting” task in which they were instructed to move in the direction of a small donut without stopping, and to end their movements ∼3–4 cm beyond an outer ring. Mechanical perturbations were produced by unexpected changes in the amplitude of the force field (arrows). C, In Experiment 2, participants performed a pointing task in which they were instructed to reach toward and stop their movements in a visual target. Throughout the task, three possible target locations were indicated in dark blue. In all trials, the central target was turned on (white). In force-field catch trials, the force field was unexpectedly activated. In visual rotation catch trials, the cursor representing the index fingertip of the participant was rotated by 30° clockwise relative to the actual hand position. In the target-jump catch trials the target moved to the leftward location (30°) upon movement onset.