
Figure 8.
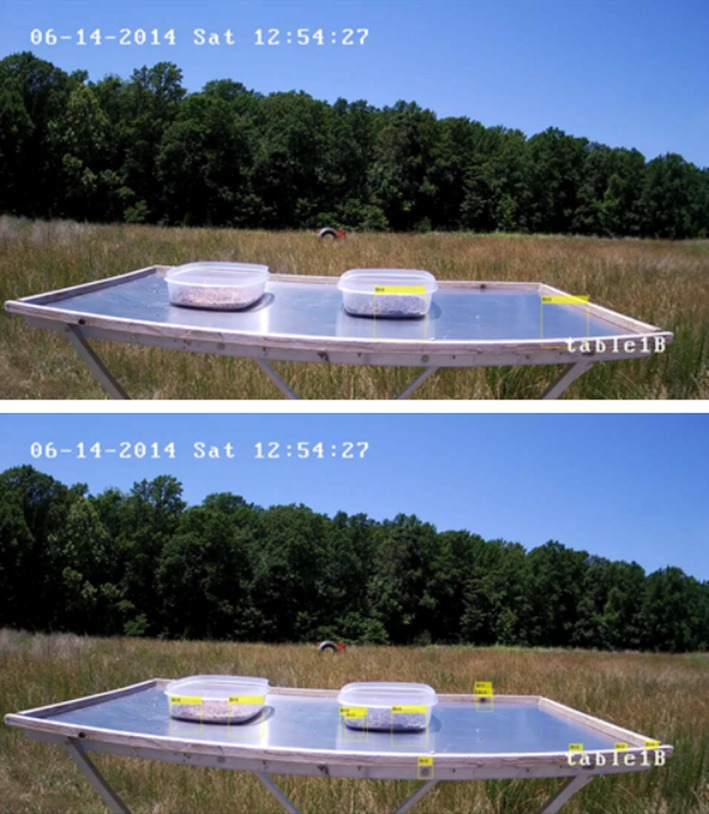
Images of the same video frame from the camera pointed directly at table1B with no birds in the frame. The yellow rectangles labeled “Bird” in each image show the bounding boxes where birds were detected using the object detection algorithm. The top image used the LBP feature detector, and the bottom image used the Haar feature detector. It can be seen that both feature detection methods had false positives. In contrast to Figure 6, these false‐positive detections occurred on the food table and were mostly due to reflections and shadows. This shows that lighting changes effect the precision of the object detector