
Figure 1.
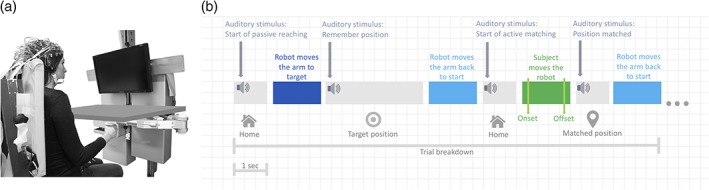
(a) A typical subject performing the position matching task with the robotic device and a board occluding vision of the arm; (b) Trial timeline. In each trial, the robot passively moved the arm toward a target position and then repositioned it to the starting position. The subject then actively moved the arm in an attempt to replicate the target position (movement's onset and offset triggered at 2 cm/s velocity threshold). Once the active movement completed, the robot passively repositioned the arm in the starting position. Four auditory cues guided subjects through the task [Color figure can be viewed at http://wileyonlinelibrary.com]