
Figure 1.
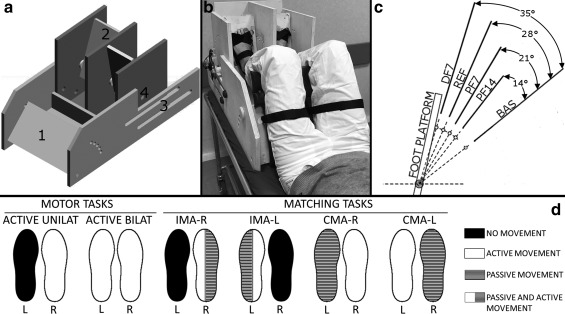
(a) Custom‐made MR compatible passive device used during the fMRI experimental protocol. The numbers indicate (1) the adjustable thigh platform; (2) the foot platforms that allow for each foot independent one degree‐of‐freedom movement in the sagittal plane; (3) the two rails (two per each side) that allow the thigh platform and the foot platforms to slide relative to one another in order to fit different subjects’ anthropometries; (4) the MR compatible optical encoder was attached to each platform axis of rotation. (b) An overview of the subject’ positioning while performing a task outside the MR environment. The thighs and the feet were firmly strapped to the corresponding platform with velcro straps. (c) The four presented platform positions (PF14, PF7, REF, and DF7) that the subjects were required to match during each proprioceptive task. The gap among the four positions is 7°. These four presented positions were defined in relation to the anatomical REF position where the legs are 90° oriented with respect to the foot. The angle values on the right show the rotation values of the platform with respect to the BAS position. BAS refers to the starting position from which each trial started. BAS was also used as starting position for the two active motor tasks. (d) Task‐fMRI protocols during motor and matching tasks. Rest and block duration were 30 s each. Tasks were randomized across subjects