
Figure 2.
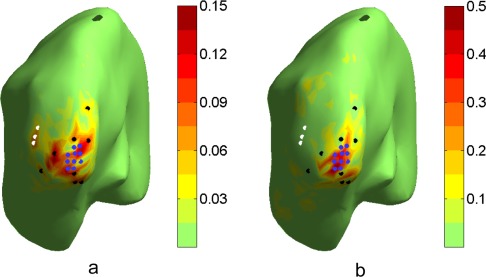
CTFs for two spatial filters aimed at extracting activity from the tip of the occipital lobe (“V1,” blue dots), while suppressing leakage from surrounding higher‐level visual areas. a) CTF for a classical minimum norm estimator (i.e. using the distributed source constraint) created for an ROI (blue dots) around V1. The CTF is centered around V1, but shows leakage from several areas outside the target ROI (e.g. around the black dots, and with a clear peak at some distance highlighted by white dots). b) CTF for a novel estimator, which combined the distributed source constraint with the discrete source constraint. The estimator was designed to optimally project on signals from the ROI around V1 (blue dots), while explicitly suppressing leakage from surrounding areas (black and white dots). The resulting CTF is more focused around V1, as intended.