
Figure 2.
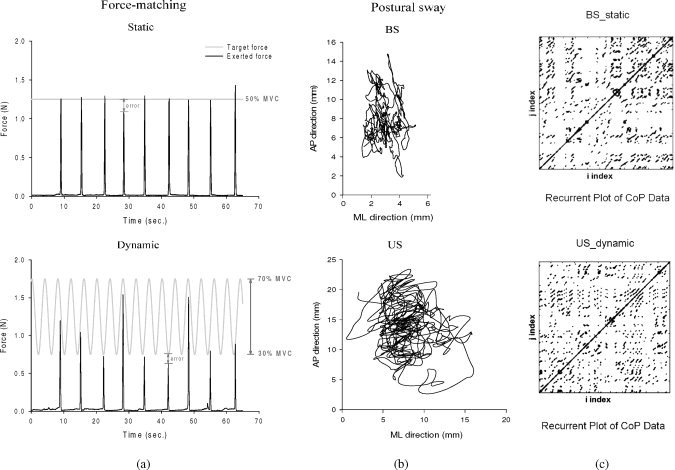
(a) A sample trial of static (top) and dynamic (bottom) force‐matching during bipedal stance. Each trial had a total of nine force‐matching events. The error of each force‐matching event was the mismatch between instantaneous target force (ITF) and peak precision grip force (PGF). (b) A sample trial of postural sway of bipedal (top) and unipedal (bottom) stances during static force matching. (c) A sample quantification of recurrence plots (RQA) of postural sway velocity during the CoP period in the BS_static (top) and US_dynamic (down) conditions. The recurrence plots (darkened points) in the phase space are constructed by plotting a pixel at coordinates (i, j), whenever pairs of data points (i and j) were separated by less than the preset threshold distance. The main diagonal line indicates a point compared with itself. (BS: bipedal stance, US: unipedal stance)