
Fig. 1.
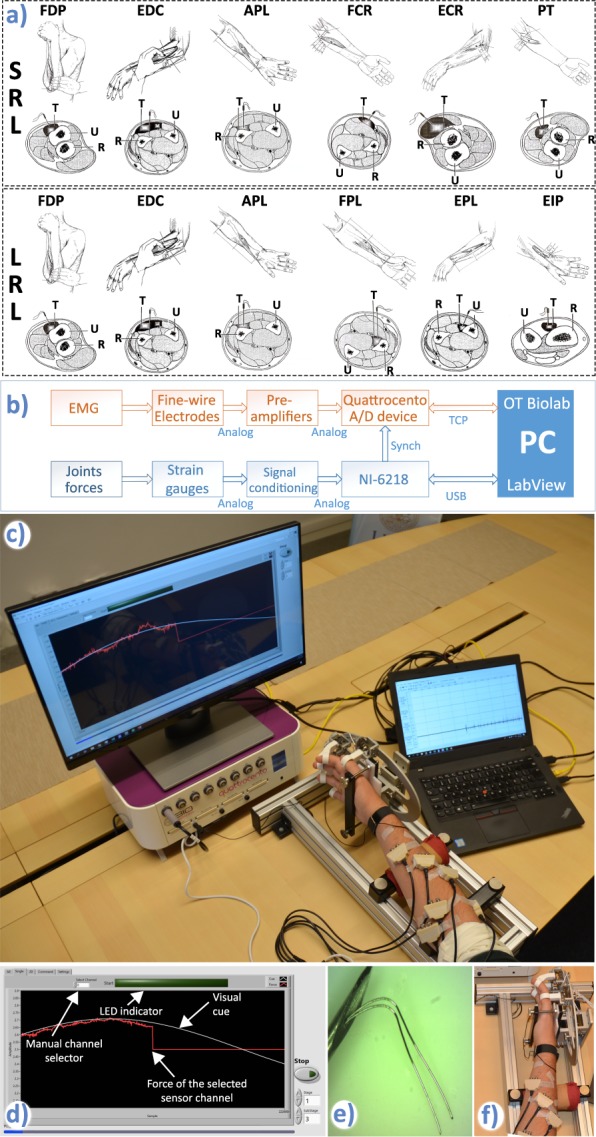
Experimental setup. (a) Targeted muscles for the short residual limb (SRL) and long residual limb (LRL) protocols. Upper rows of both protocols show manoeuvres preceding needle insertion and the insertion points. Bottom rows show locations of targeted muscles (T), ulna (U) and radius (R) in the forearm cross sections at the needles insertion points. Modified from Perotto et al.27. Courtesy of Charles C Thomas Publisher, Ltd., Springfield, Illinois. (b) Signal measurement chain showing two separate systems for acquisition of EMG and joint forces. The hardware synchronization was implemented as a digital line between the NI card and the Quattrocento device. (c) Measurement setup: Force/torque measurement apparatus, preamplifiers, visual cue and measurement flow control, Quattrocento amplifier and OT BioLab software for real-time monitoring of the iEMG signals. (d) Screenshot of the LabVIEW GUI during the sine-tracking task. (e) Fine-wire electrode tips. (f) Position of the hand within the force measurement device.