
Fig. 1.
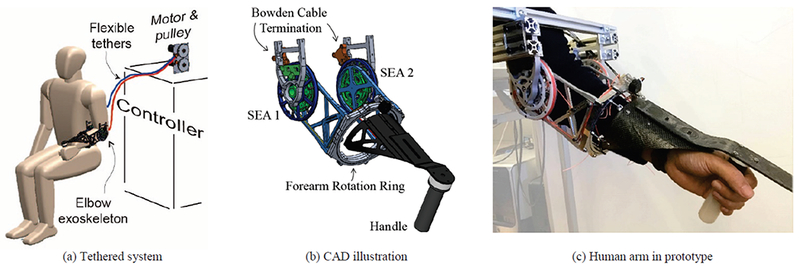
Mechanical design of the tethered system. (a) The system consists of off-board actuation and control hardware, flexible Bowden cable, and end-effector worn by the subject. (b) The end-effector has two independent series elastic actuator (SEA) on each side of the elbow. Their coordination provides the desired torque for elbow flexion/extension and supination/pronation. The two SEAs are connected together through the forearm ring, which is free to rotate relative to the frame. Carbon fiber extension and handle are bolted to the ring. (c) Prototype of exoskeleton.