
Fig. 2.
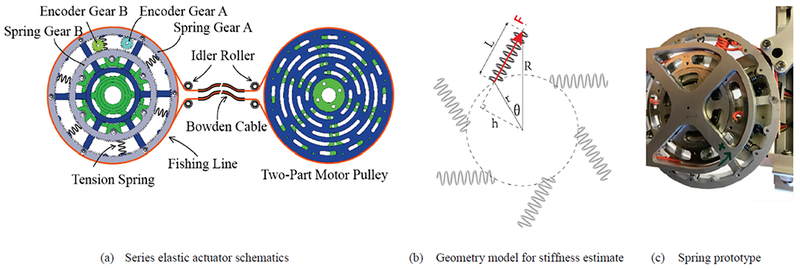
Mechanical design of the modularized series elastic actuator. (a) The series elastic element is a two-part assembly, consisting of a large wheel (blue) and a small wheel (green). These two wheels can rotate relative to each other within ±12° and they are connected by tension springs in a circular pattern, forming a custom torsion spring assembly. There are two digital encoders measuring the position of the big wheel and small wheel. On the motor end, a two-part motor pulley keeps the tension in the fishing line. The arched slots on the motor pulley ensure that the two pulley discs can be clamped down at any relative position. Idler rollers are used to regulate the winding of the fishing line on the pulley as well as the angle to enter the Bowden cable tether. (b) Simplified SEE geometry for calculating its stiffness. (c) A close up picture of the series elastic element.