
Fig. 2.
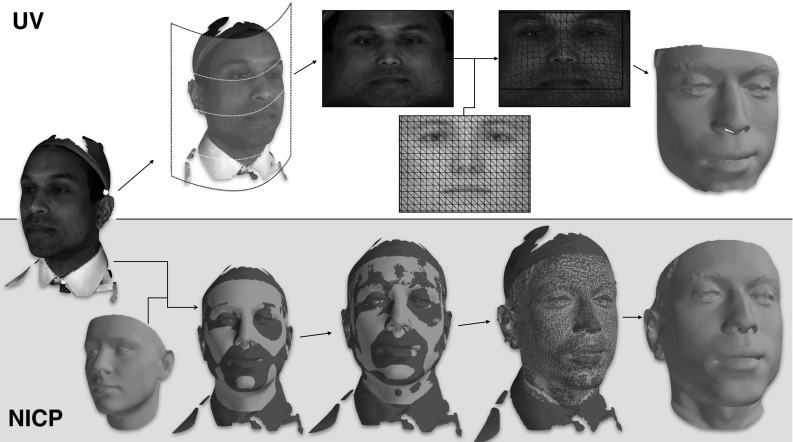
There are two techniques used to establish dense correspondence in 3DMMs. Top correspondence is established in a UV space—typically a cylindrical projection of the mesh shape and texture information. The UV image of each mesh is registered to a template UV image, and subsequent sampling produces a mesh in correspondence with the template. Bottom non-rigid iterative closest point (NICP), guided by sparse annotations, can be employed to iteratively deform a 3D template to match each mesh, avoiding the UV space entirely