
Fig. 4. Diced devices are self-assembled into 3D magnetic sensors and their characteristics.
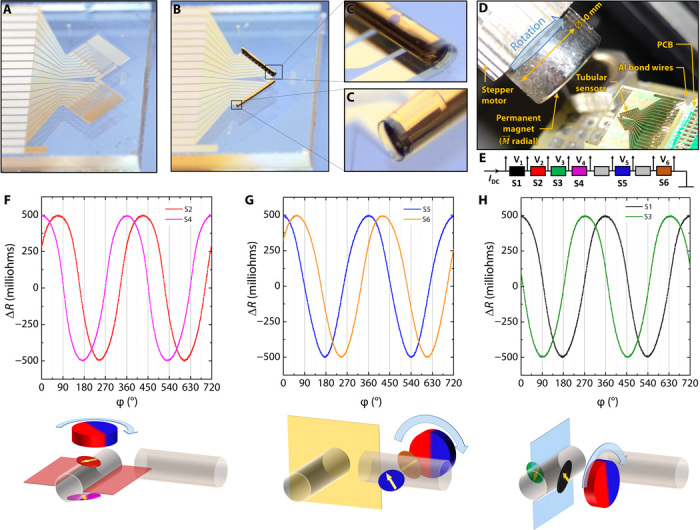
(A) Planar device with a set of magnetized and electrically connected SVs before self-assembly. (B) The devices after self-assembly revealing two orthogonal tubes with a diameter of ∅250 μm and length of 2.3 mm. The rolling length is 1.58 mm. (C) Magnification of two tubes showing one of eight SVs. (D) The 3D sensor was characterized by rotating the magnetic field of a permanent, radially magnetized magnet. The position of the magnet can be adjusted by tilting the magnet around the sensor and tuning the distance between the magnet and the sensor. The sensor itself can be rotated in the horizontal plane. This allows setting the rotating magnetic field plane to any arbitrary orientation with respect to the sensor. (E) Schematic depicting the electrical series connection of the sensors, their supply, and signal acquisition. (F) Behavior of the XY pair (S2 and S4) of the orthogonal magnetic sensors formed on the opposite sides of the respective tube and the sketch showing the orientation of the rotating magnet with respect to the sensors. (G) Behavior of the XZ pair (S5 and S6) of the orthogonal magnetic sensors formed on the opposite sides of the respective tube and the sketch showing the orientation of the rotating magnet with respect to the sensors. (H) Behavior of the YZ pair (S1 and S3) of the orthogonal magnetic sensors formed on the opposite sides of the respective tube and the sketch showing the orientation of the rotating magnet with respect to the sensors. Photo credit: Daniil Karnaushenko, Institute for Integrative Nanosciences, Leibniz IFW Dresden.