
Fig. 6. Collective movements in 3D.
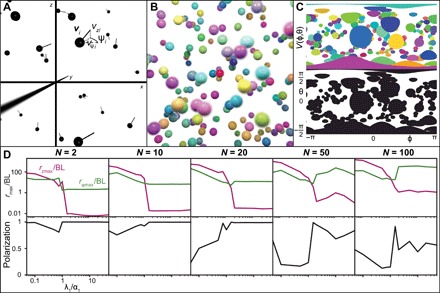
(A) A set of spheres with diameter BL is considered. Each sphere is propelled with a velocity vi(t) = vψi(t)eψ(t) + vzi(t)ez. (B) A set of colored spheres is randomly distributed in space. The point of view of the red sphere is considered here with an idealized omnidirectional field pointing inside the image. (C) The projection of the visual field in 3D is given by a 2D surface. On top, objects can be represented by their colors. However, on the bottom part, a binary visual field is given. It is not possible to distinguish individuals. Because of the spherical nature of the projection, objects seem more deformed when they are further away from the horizon (θ = 0). (D) Top to bottom: The average closest neighbor distance and the polarization of the swarm and the minimal distance observed in the simulations (42) as function of λ1. For different numbers of individuals, from left to right, N = 2, 10, 20, 50, and 100. α1 = β1 = 0.1, α0 = 5.0, β0 = 2.0, and λ0 = 10.0.