
Fig. 1. Scheme and demonstration of the magnetic-actuated robot.
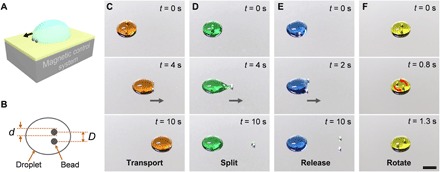
(A) Scheme of the droplet manipulation system. (B) Parameters describing the magnetic-actuated robot. (C to F) Typical behaviors of the droplets manipulated by the robot. Droplets can be transported (C), split (D), released (E), and rotated (F) by the robot. The gray arrows represent the moving direction of the robots. The moving speed is 2 mm/s. The volume of the droplets is 250 μl. Scale bar, 5 mm.