
Fig. 2. Diagram and mechanical analysis of the droplet manipulation.
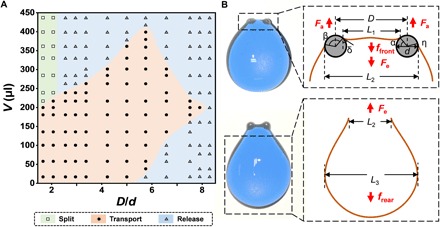
(A) Phase diagram showing the diverse behaviors of the droplet with the variation of D/d and V. (B) Mechanical analysis explaining the actuating ability of the robot. Three forces, including the adhesion force between the liquid and the beads (Fa), the adhesion force between the liquid and the substrate (ffront), and the resilience force due to the deformation of the droplet (Fe), determine the movement of the TCL at the front end of the droplet (the upper scheme). Two main forces (Fe and frear) affect the movement of the TCL at the rear end of the droplet (the lower scheme).