
Fig. 3. Generality demonstration of the robot.
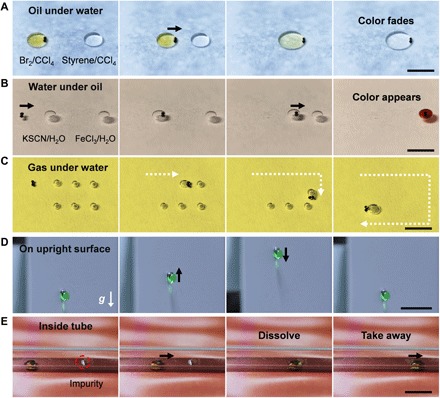
(A) Oil droplet manipulation under water. The oil droplets (100 μl) are CCl4-dissolved with Br2 (left) and styrene (right). The robot transports the left droplet to mix with the right one. (B) Water droplet manipulation under oil (n-heptadecane). The droplets (50 μl) are water-dissolved with KSCN (left) and FeCl3 (right), respectively. The left droplet is captured by the robot and transported to the right one. (C) Gas bubble manipulation under water. A superhydrophobic robot can successively collect the gas bubbles (20 μl). The white dotted line indicates the trajectory of the robot. (D) Manipulation of a water droplet on the upright surface. The robot transports a 20-μl water droplet to move up and down with a speed of 2 mm/s. (E) Manipulation of a water droplet inside a tube. A droplet (20 μl) is actuated by the robot to capture the impurity inside a tube. After 1 min, the impurity is dissolved and taken away by the droplet. The red dashed circle indicates the location of the impurity. The black arrow indicates the movement of the droplet. Scale bars, 10 mm.