
Fig. 5. Optimal sensing in the presence of time integration.
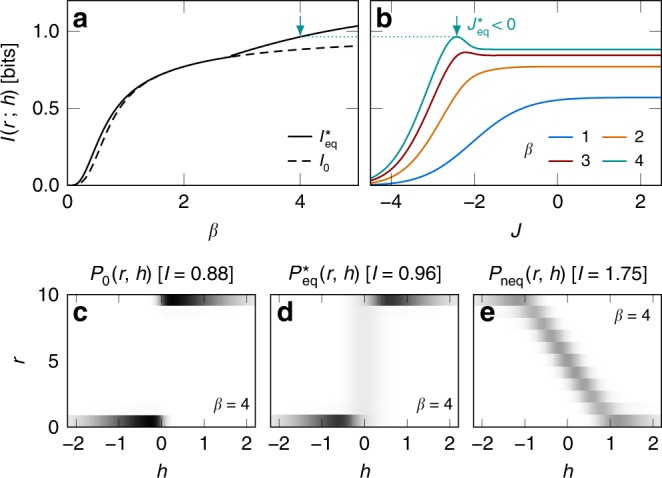
Sensor interaction and energy consumption remain important for optimal sensing in the presence of time integration of sensor states by a population of readout molecules. We consider a two-sensor complex, driven by signal H = (h, h) with and coupled to a readout population r (Eqs. (11), (12)). a Mutual information between the signal and the readout population for noninteracting sensors (dashed) and optimal equilibrium sensors (solid). Independent sensors are always suboptimal. b Mutual information as a function of sensor coupling J at various sensor reliabilities β (see legend). The optimal equilibrium strategy changes from cooperativity (J > 0) in the noisy limit to anticooperativity (J < 0) in the low-noise limit. c–e Joint probability distribution of signal and readout population at β = 4 for three sensing systems: noninteracting c, optimal equilibrium (d), and near-optimal nonequilibrium (e) (cf. Fig. 4). Optimal equilibrium sensors use anticooperativity to increase the probability of the states +− and −+, which map to intermediate readout populations 0 < r < r0, and as a result, allows for a more efficient use of output states compared with noninteracting sensors. Nonequilibrium drive lifts the degeneracy of intermediate readout states, leading to an even more effective use of readout states. For the nonequilibrium example in e, we obtain Ineq = 1.75 bits, compared with bits for optimal equilibrium sensors at the same β. In a–e, we use Δ = 1 and r0 = 10, and in e, J = −2, t = 7, and δ = −0.6.