
Fig. 1.
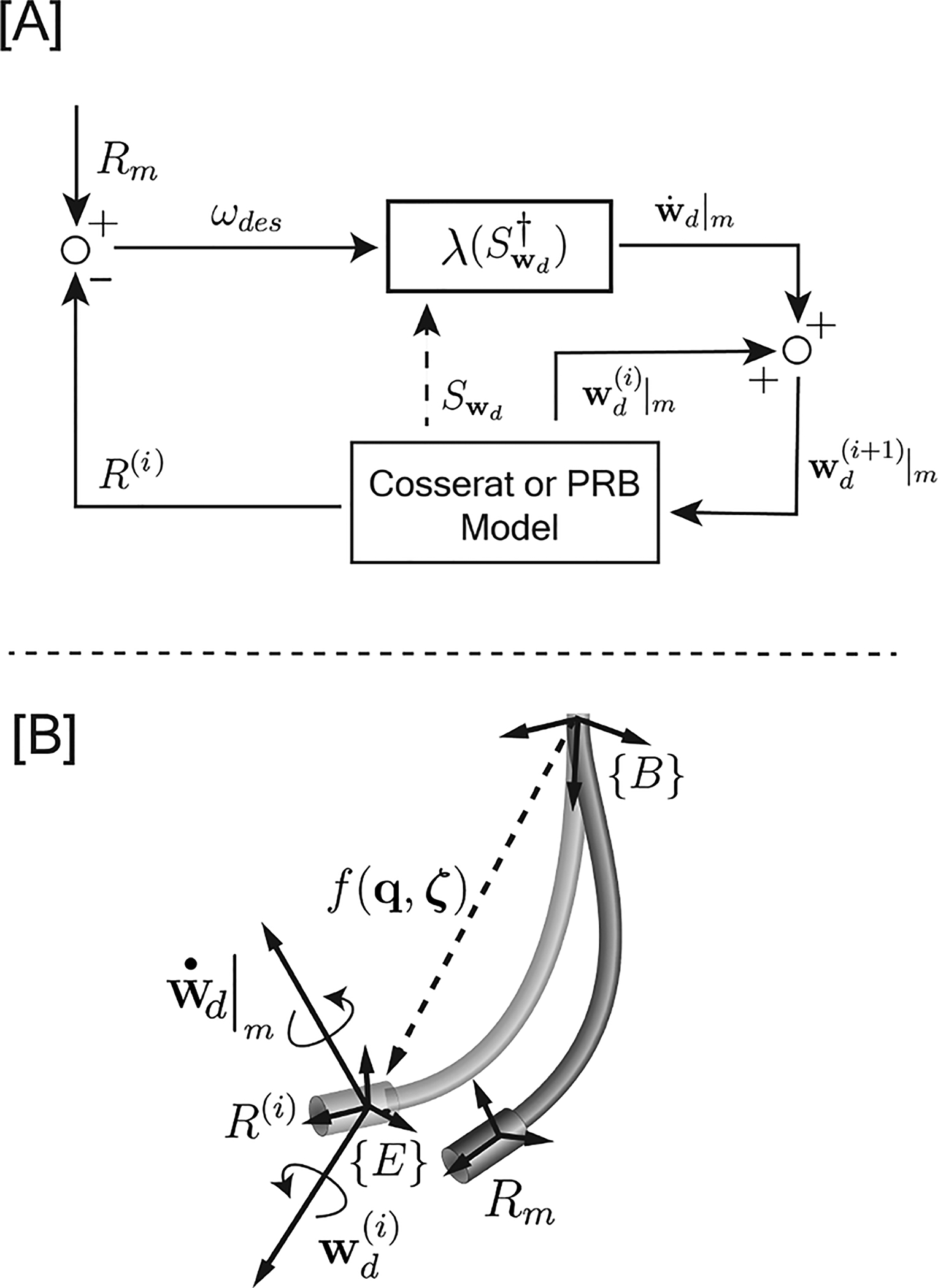
Iterative disturbance estimation algorithm. [A] Block diagram illustrating the iterative update of the disturbance based on inclinometer data. The initial value for is obtained after initial calibration. [B] The compliance matrix Swd is used to minimize the orientation error between current estimated orientation R(i) and the measured value from the sensors Rm.