
Fig. 3.
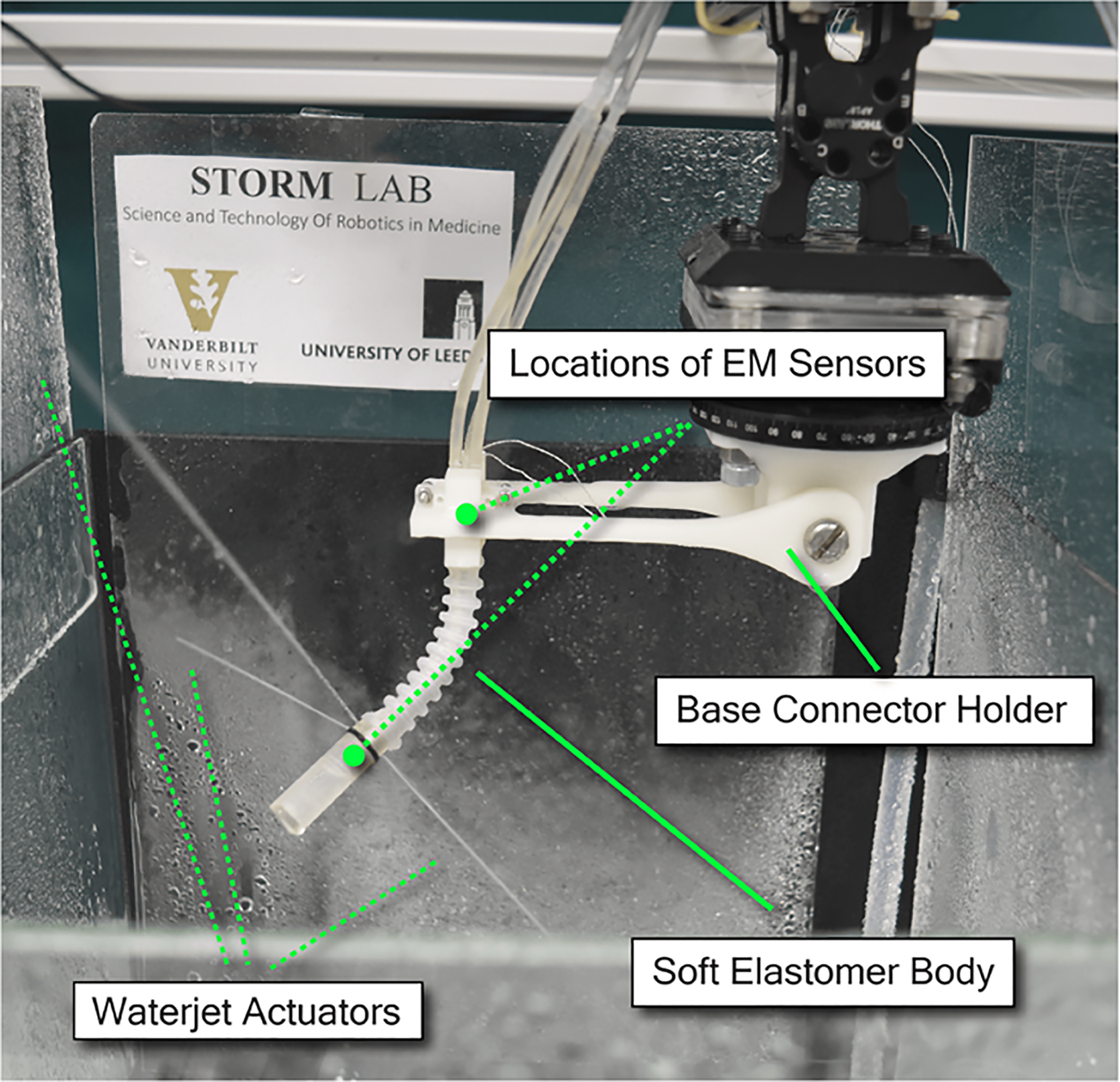
Experimental bench test setup consisting of the Hydrojet Endoscopic Device. A 3D printed holder anchors the base of the device while the waterjets at the tip cause deflection of the soft elastomer body.
Official websites use .gov
A
.gov website belongs to an official
government organization in the United States.
Secure .gov websites use HTTPS
A lock (
) or https:// means you've safely
connected to the .gov website. Share sensitive
information only on official, secure websites.
Experimental bench test setup consisting of the Hydrojet Endoscopic Device. A 3D printed holder anchors the base of the device while the waterjets at the tip cause deflection of the soft elastomer body.