
Fig. 6.
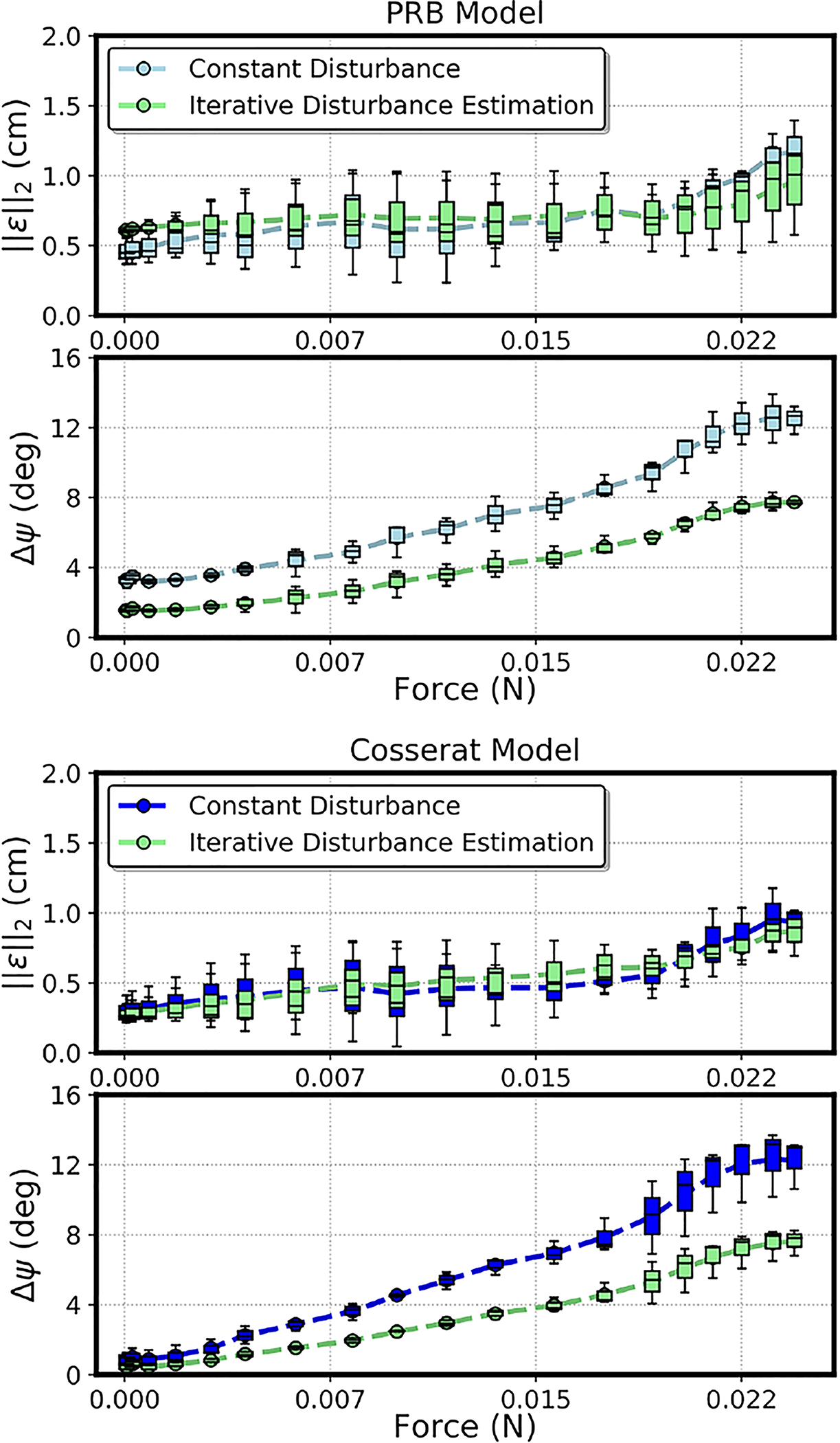
Box plot showing error distribution and variability over the nine sweeping motions. The iterative estimation of the disturbance wrench using sensor data allows for significant reduction in the rotation error for both modelling frameworks.
Official websites use .gov
A
.gov website belongs to an official
government organization in the United States.
Secure .gov websites use HTTPS
A lock (
) or https:// means you've safely
connected to the .gov website. Share sensitive
information only on official, secure websites.
Box plot showing error distribution and variability over the nine sweeping motions. The iterative estimation of the disturbance wrench using sensor data allows for significant reduction in the rotation error for both modelling frameworks.