
Fig. 1.
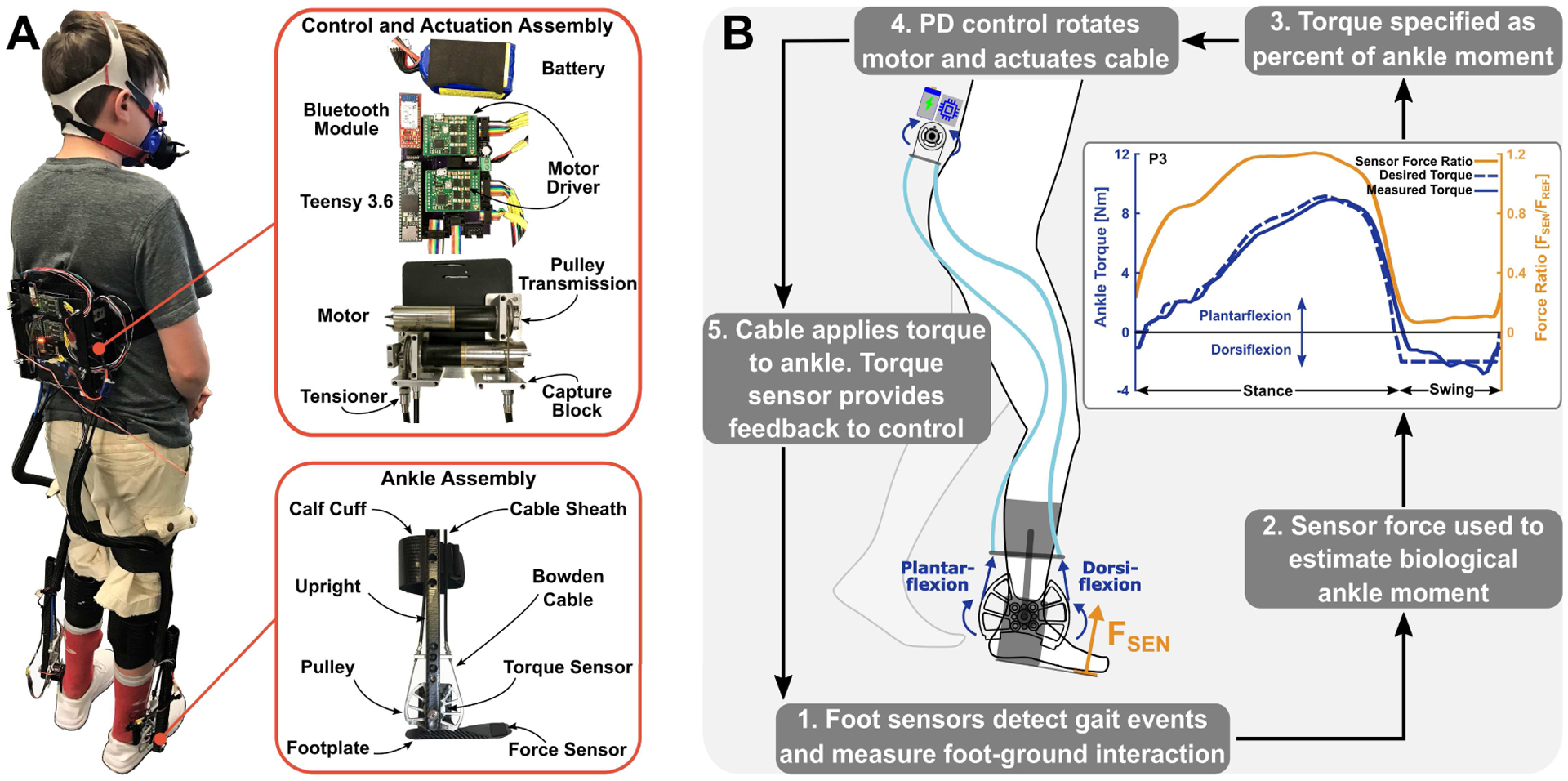
Mechanical and control system overview. (A) The exoskeleton consisted of the ankle, control, and actuation assemblies. (B) The actuation assembly transmitted force through Bowden cables to rotate the ankle pulley and footplate and provide plantar- or dorsi-flexion assistance. Custom force sensors controlled state transitions and served as input into the adaptive force controller. The proportional joint-moment control scheme adapted to each participant’s gait patterns as demonstrated by P3’s averaged experimental force sensor ratio, desired torque, and measured torque profiles.