
Fig. 10:
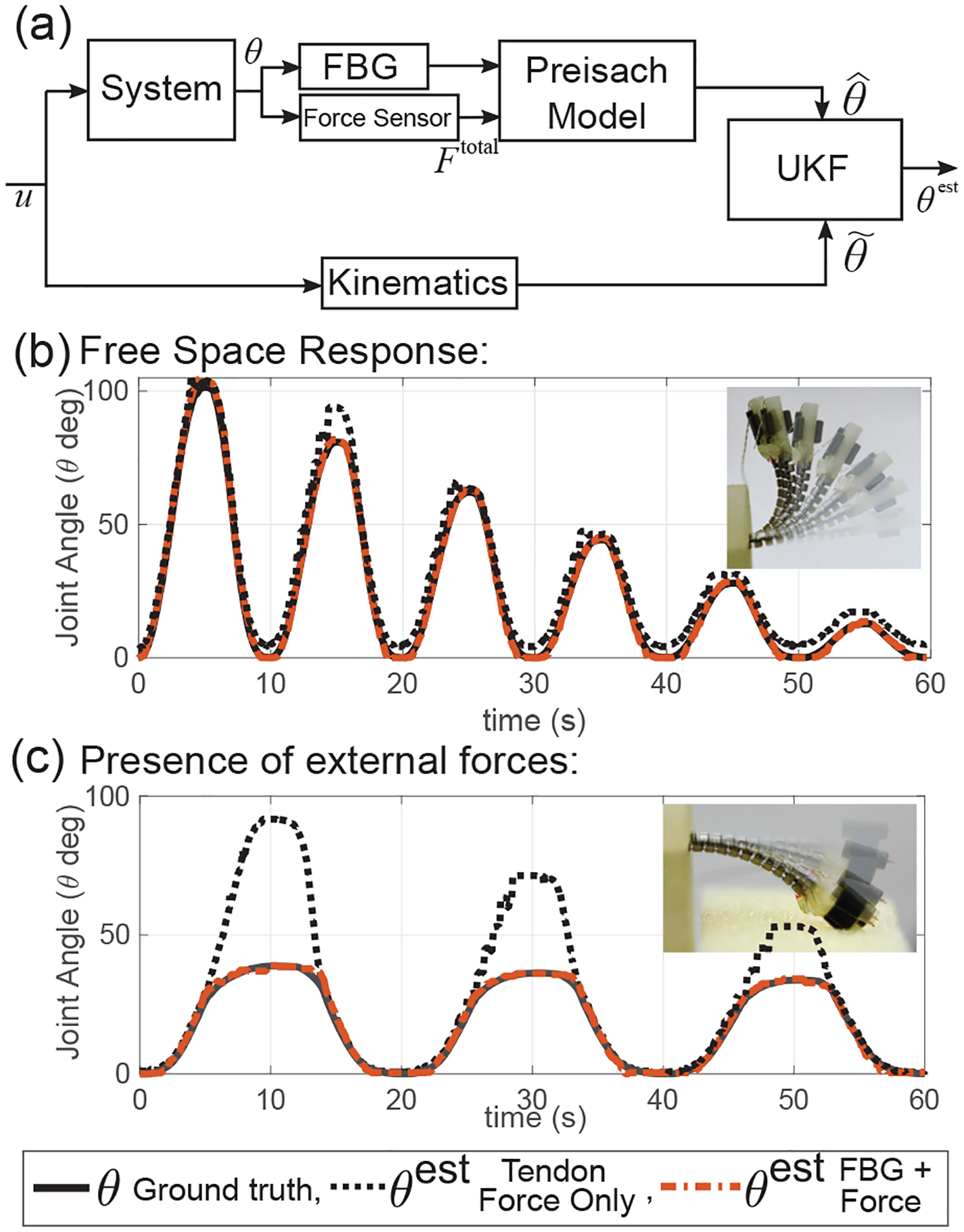
(a) UKF based observer for the meso-scale robot involves combining a kinematics model, tendon tension (f) and FBG fiber wavelength (Δλ) to generate joint angle estimate (θest), (b) Free space response of the observer, (c) Response of the observer in the presence of external tip forces.