
Fig. 8:
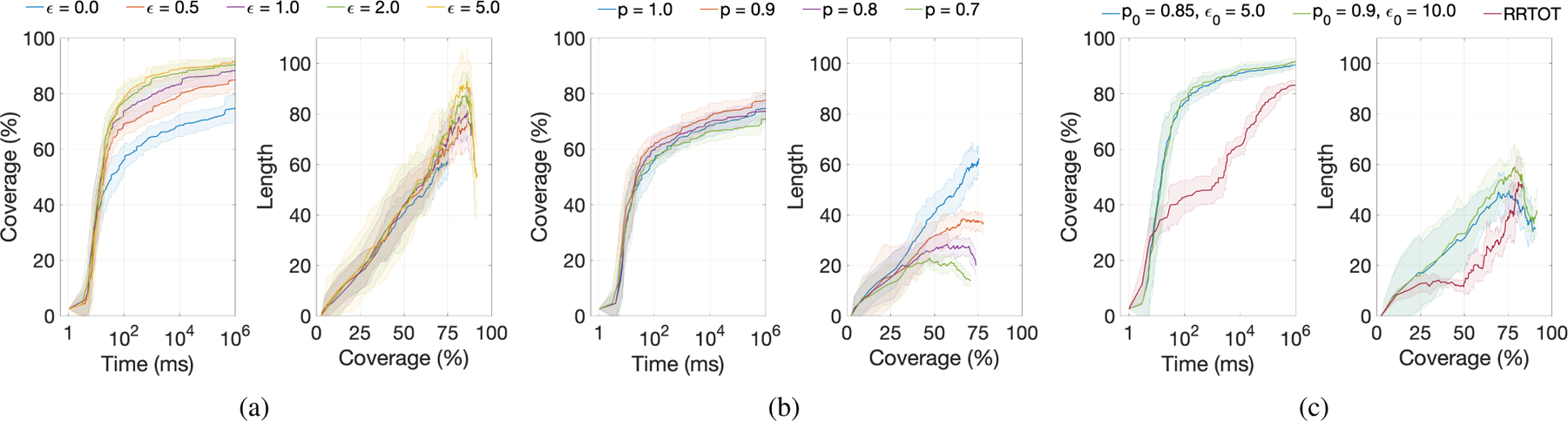
Quality of inspection paths computed for the planar manipulator. (a) IRIS running with p = 1, f = 0 and varying values of ε. (b) IRIS running with ε = 0, f = 0 and varying values of p. (c) Comparison of IRIS and RRTOT. IRIS running with two input parameter settings, both with f = 0.03.