
Fig. 1. Spine-inspired bistable soft actuators.
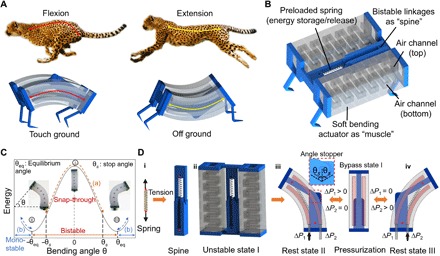
(A) Bioinspired by the active spine mechanism during cheetahs’ high-speed galloping, a bistable spine-based hybrid soft actuator is proposed to realize the similar spine flexion and extension through reversible snap-through bistability for design of high-speed locomotive soft robots. (B) Schematic design of a bistable hybrid soft bending actuator (BH-SBA). It consists of three components: two soft pneumatic two-way bending actuators as skeletal muscle, a three-dimensionally (3D) printed flexible mechanism composed of two rigid hinged links as a spine, and a pretensioned spring that connects two ends of the mechanism for potential mechanical energy storage and release. (C) Schematics of energy landscape of the bistable actuator, showing one peak (unstable state I) and two localized minimum energy states (stable states II and III). It provides two operating regimes: one is the bistable switch in path a, and the other is the monostable state in path b. Insets show the corresponding Ecoflex-based bistable actuator prototypes at each state. (D) Schematic illustration of the bistable working mechanism under both nonactuated (spring pretension release at resting states in i to iii) and actuated states (reversible snapping-through under pneumatic actuation in iii and iv). The inset shows the set of an angular stopper to constrain the maximum bending angle at the preset stopping angle of θs.