
Fig. 5. Bistability for high-speed underwater fish-like soft robot.
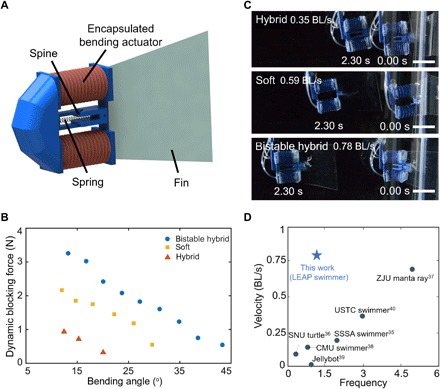
(A) Schematic of the proposed fish-like robot, which is composed of the bistable actuator attached with a polymeric fin. The schematic head is for decoration purpose only. (B) Comparison between the bistable actuator and its two counterparts of hybrid and soft actuators in dynamic blocking force versus blocked bending angle. All actuators are pressurized at 160 kPa and an average frequency of 1.3 Hz. (C) Demonstration of underwater locomotion in bistable hybrid soft swimmer and its two counterparts at different actuation time: soft swimmer based on encapsulated soft actuator and hybrid soft swimmer based on encapsulated hybrid actuator. The bistable hybrid soft swimmer shows the fastest speed. Scale bars, 50 mm. (D) Comparison of swimming velocity between the proposed bistable hybrid soft fish-like robot (denoted as star-shaped symbol) and various reported underwater soft swimmers (denoted as round symbols). Photo credit: Yichao Tang, Temple University.