
Fig. 6. Bistable hybrid soft grippers with wide-range variable stiffness modulation.
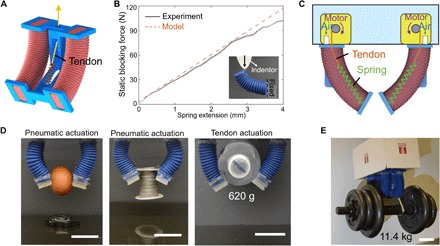
(A) Schematic of the encapsulated bistable hybrid actuator driven by tendon. (B) Stiffness test of the encapsulated actuator (bent at 75°; insets). We characterize the force as a function of spring extension. The solid line is the mean of three experiments (with shaded error bar), and the dashed line presents the theoretical model result. The stiffness is calculated as the slope of the force versus indentation depth. (C) Schematic illustration of the proposed gripper by assembling two actuators. The manipulation can be controlled by both motors, through pulling the spring, and pneumatic signals. (D) Demonstrations of its capability in grasping various objects in different shapes and weight. (E) Demonstration of high-load manipulation. Scale bars, 50 mm. Photo credit: Yichao Tang, Temple University.