
Figure 1.
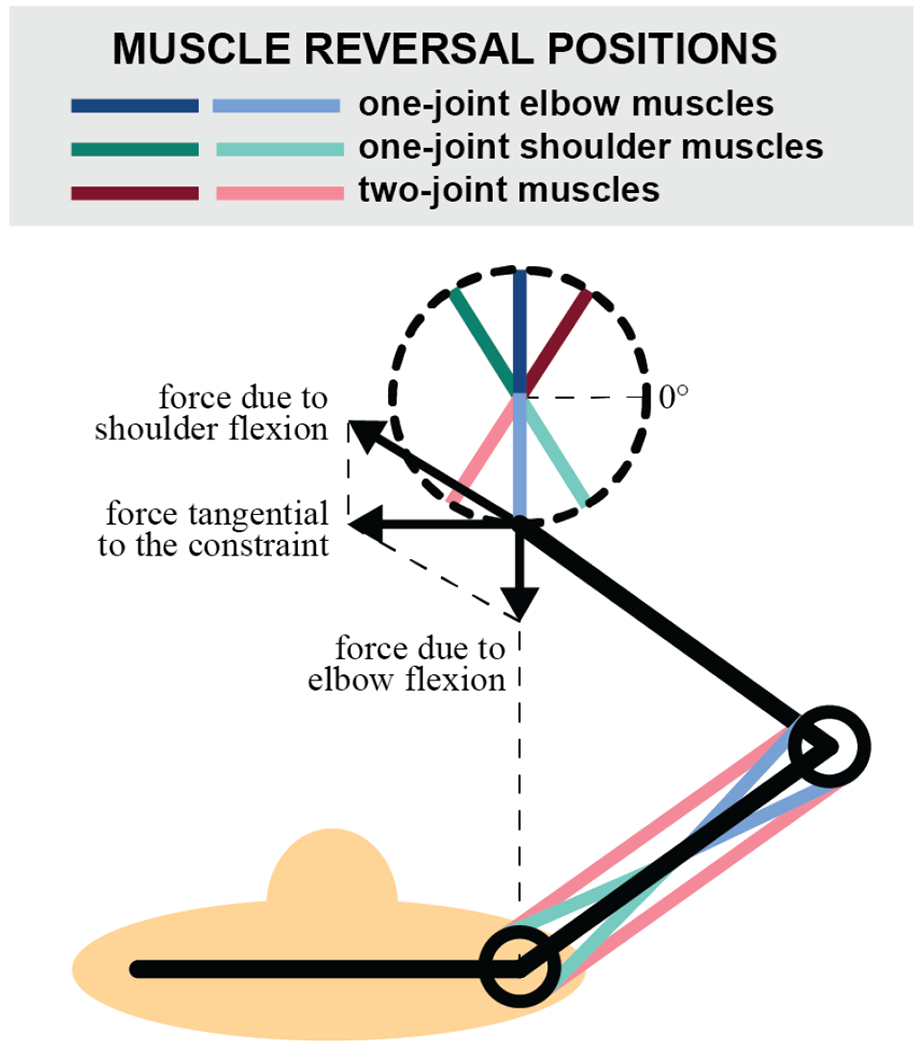
In this simplified two-link arm model, the moment arms of all muscles are assumed to be constant. The links of the arm are of equal length (30cm each). The center of the circular constraint (radius = 10cm) is aligned with the shoulder joint and 45cm in front of the shoulder joint. Colored radial lines depict reversal positions for the 3 muscle types. Dark and light shading denotes two distinct reversals for each muscle group. At these positions along the circular constraint, the respective muscle cannot generate tangential force. If subjects are minimizing muscle effort to perform this task, we predict that the respective muscles will be deactivated at these positions along the constraint.