
Fig. 2.
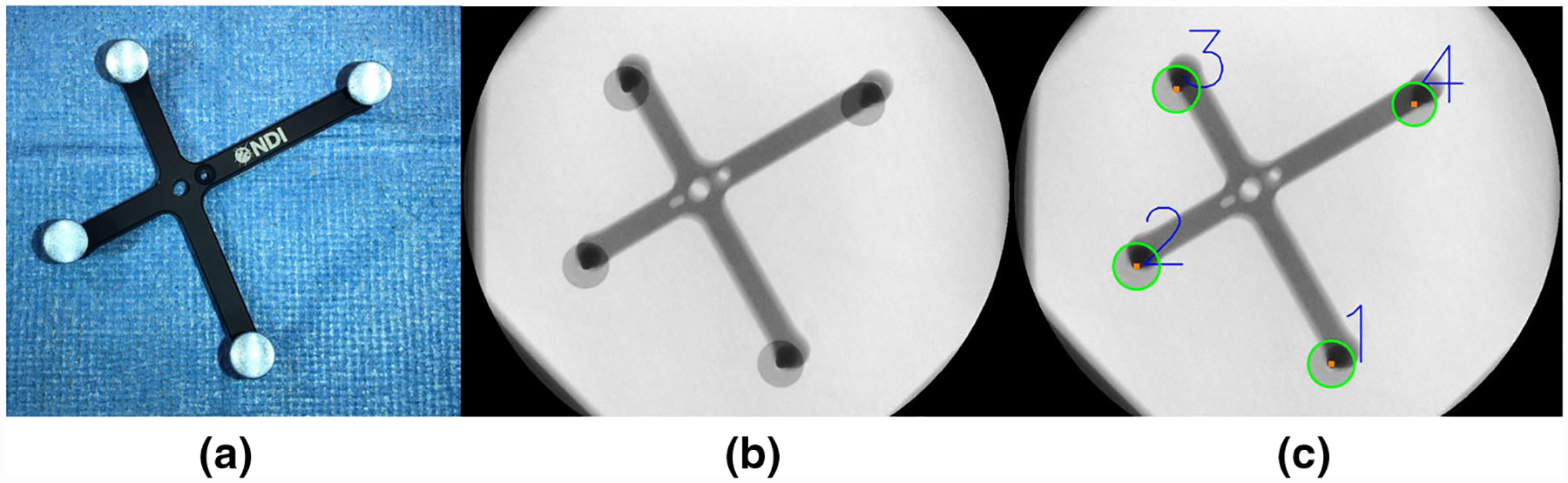
a A photograph of the marker used for offline calibration of the system. Its 3D geometry, and in particular the location of the 4 infrared reflective spheres, is precisely known enabling 3D pose retrieval via outside-in optical tracking. b An X-ray image of the same marker with c detected centroids of the spheres. When the marker is stationary, poses extracted from a and c enable calibration of the optical tracker to the C-arm source as described in “System calibration” section