
Fig. 1.
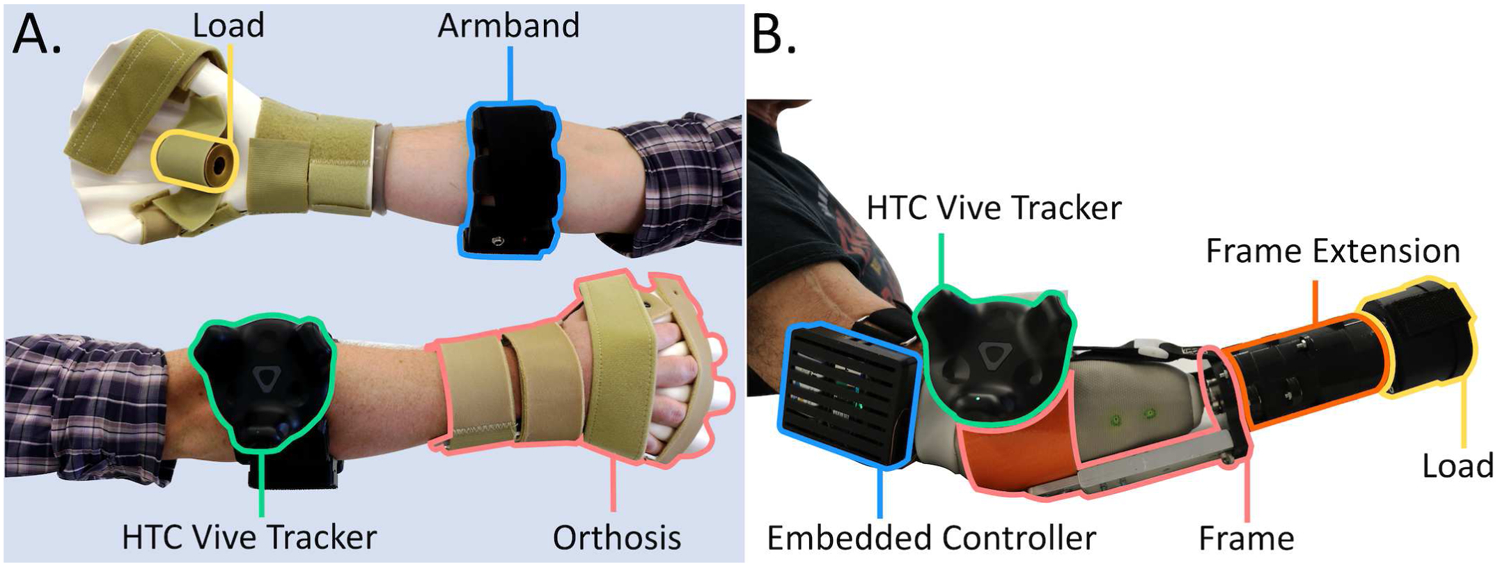
A: Palmar (top) and dorsal (bottom) view of the intact limb subject setup. The armband housed electrodes and an embedded controller that acquired and classified EMG signals. The orthosis was used to restrict wrist flexion/extension and hand opening/closing. Loads were attached to the orthosis. B: Dorsal view of the amputee subject setup. Wet electrodes were secured under a liner and signals were classified by an embedded controller. We used a frame to hold the tracker and loads, which were positioned where a prosthetic hand would be using frame extensions. The embedded controller was strapped to the upper arm and was not connected to the load-bearing frame. Both: The HTC Vive tracker tracked limb position.