
Fig. 5.
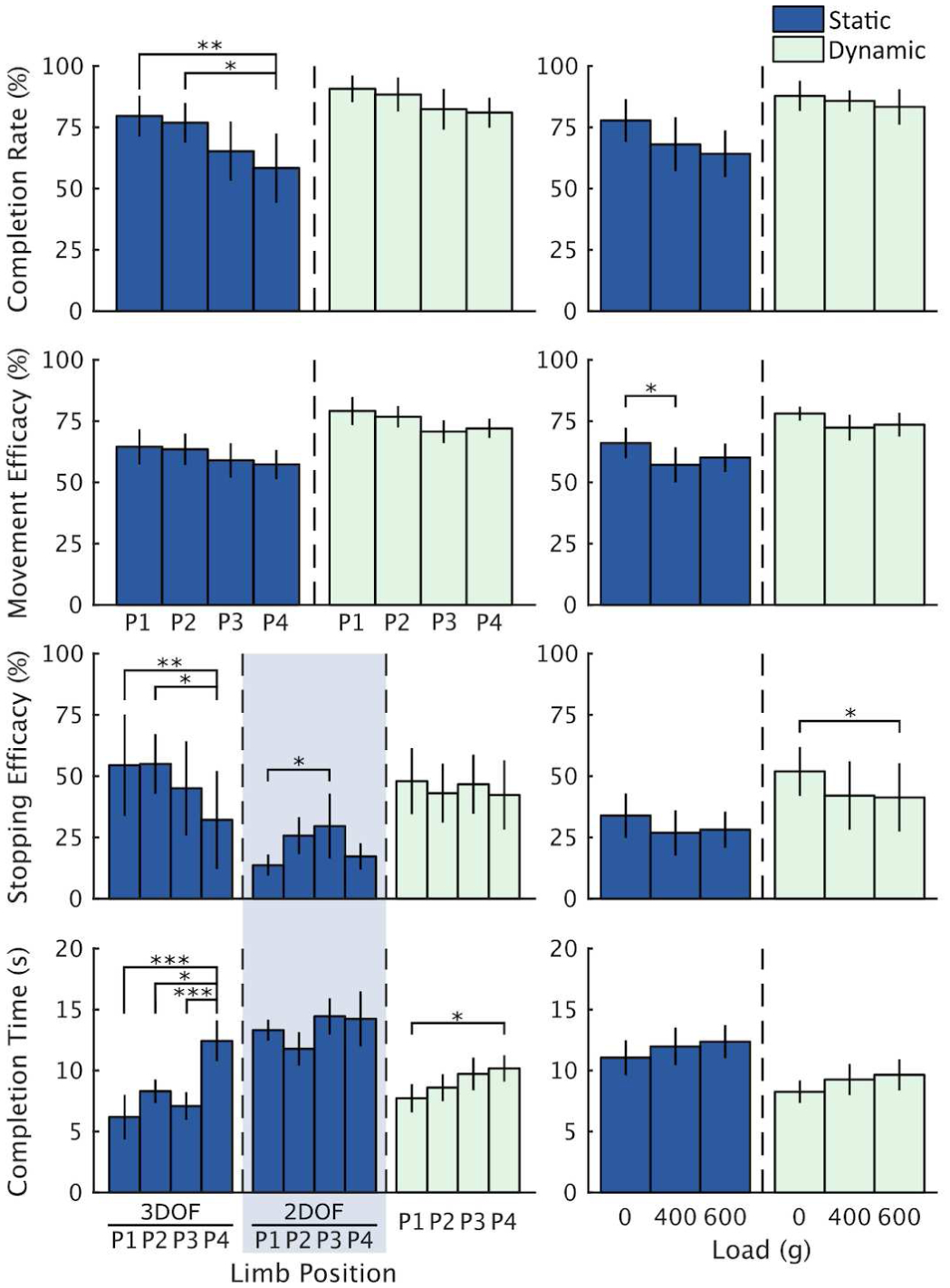
Amputee subjects results. When the controller was trained statically, limb position (left) significantly affected completion rate for all amputee subjects. Limb position affected completion time and stopping efficacy for subjects who used a 3DOF controller, and affected stopping efficacy for subjects who used a 2DOF controller. There were fewer differences between positions than in intact limb subjects. When dynamic training was used, limb position only affected the completion time of P4. Although dynamic training reduced limb position effects, this change was not statistically significant. Increasing the load (right) significantly decreased movement efficacy and stopping efficacy. Overall, training dynamically significantly improved controller performance.