
Fig. 4.
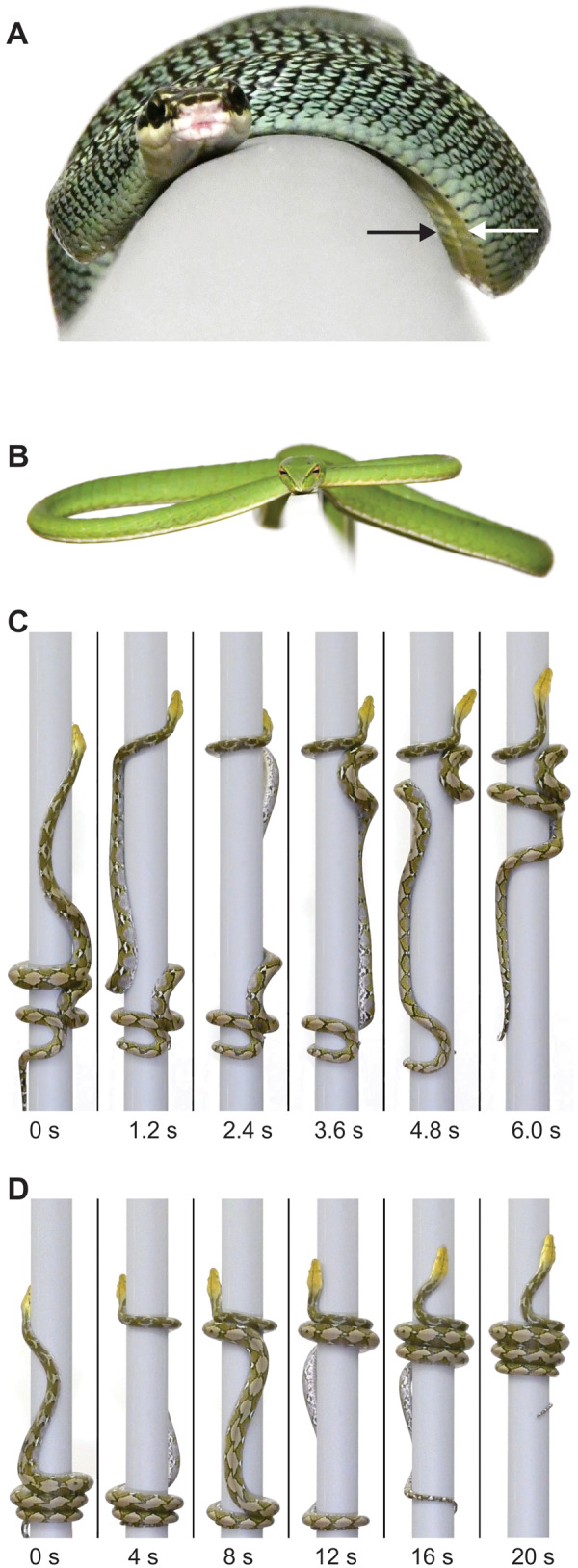
Mechanisms for preventing slipping and falling during arboreal locomotion. (A) Lateral undulation of a highly arboreal gliding snake (Chrysopelea ornata, total length, L = 112 cm) on a smooth horizontal cylinder with a diameter of 5 cm. The snake can modulate the sharpness of the longitudinal keels (indicated by arrows) that are near the lateral margins of the ventral scales. The leading edge of the snake (white arrow) often does not contact the surface, whereas contact of the sharp keel on the trailing edge of the lateral bend (black arrow) occurs and appears to reduce backward slipping. See supplementary videos at https://www.youtube.com/watch? v=KT2kcqvhPnQ and https://www.youtube.com/watch? v=ZnSHVAjULyI. (B) A Southeast Asian vine snake (Ahaetulla prasina L = 113 cm) balancing on a flat surface only 6 mm wide. (C, D) Gripping during concertina locomotion of a reticulated python (P. reticulatus, L = 197 cm) climbing a vertical cylinder with a 9 cm diameter. The python may use either the more common behavior of bending alternately to the left and right (C) or wrapping helically with nearly all of the body (D) to grip the cylinder. All of the cylinders were covered with gaffer’s tape (Shurtape P-665).