
Figure 4.
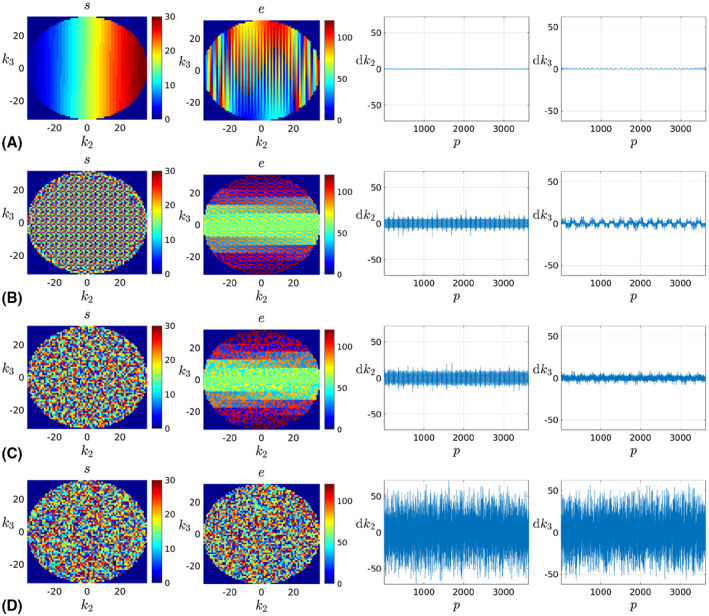
Segment m and tiling e temporal orders together with trajectory derivatives and (left to right) for Alternating zig‐zag tiling orders used in steady‐state sequences. The example corresponds to a case with P = 3630 profiles, M = 30 segments and tiling pattern . A, Sequential; B, Checkered; C, Random‐checkered; and D, Random segments