
FIGURE 2.
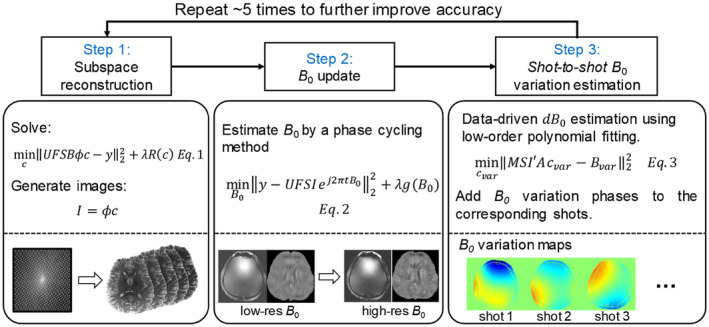
Flowchart of the subspace reconstruction with B 0 update and shot‐to‐shot B 0 variation correction. In step 1, image magnitude is estimated by subspace reconstruction using the low‐resolution B 0 map from the fast calibration data. In step 2, the high‐resolution phase can be estimated by the B 0 update algorithm with fixing image magnitude. In step 3, shot‐to‐shot phase variation of each shot can be estimated from the undersampled data, and applied to the phase evolution in the reconstruction model. The large loop of the three steps can repeat several times to improve the accuracy of both image magnitude and phase