
Fig. 6.
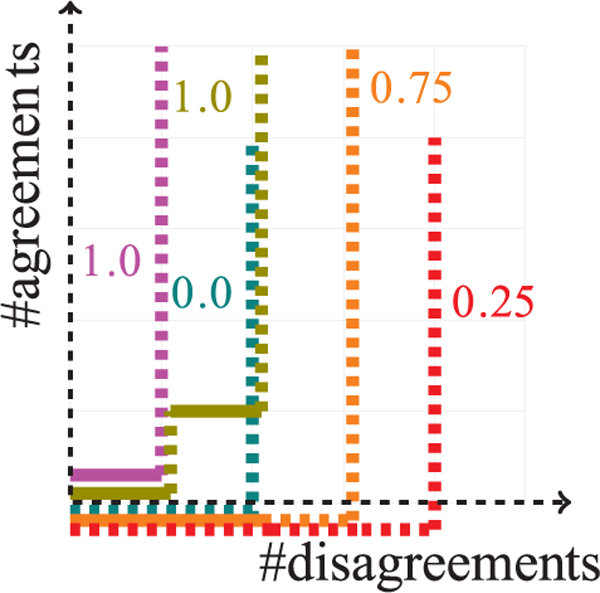
Instances of different user behaviors in the first trial of the Mutual-adaptation session of the human-subject experiment described in Section 6. A horizontal/vertical line segment indicates human and robot disagreement/agreement on their actions. A solid/dashed line indicates a human rotation towards the sub-optimal/optimal goal. The numbers denote the most likely estimated value of α.