
Figure 1.
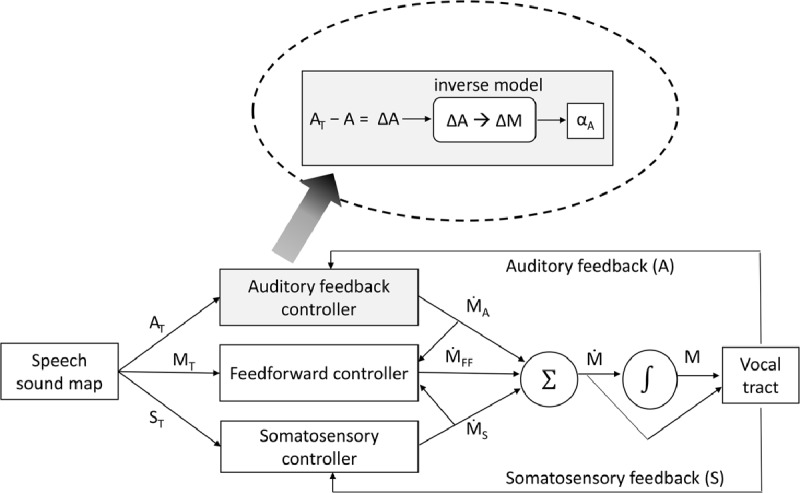
Schematic of the DIVA model (adapted from Guenther, 2016). The inset shows the calculations within the auditory feedback controller. AT = Auditory Target; MT = Motor Target; ST = Somatosensory Target; ṀA and ṀS = corrective movement commands from auditory and sensory routes, respectively; ṀFF = feedforward movement command; Ṁ = overall movement command. M = motor position command; αA = gain factor.