
Figure 2.
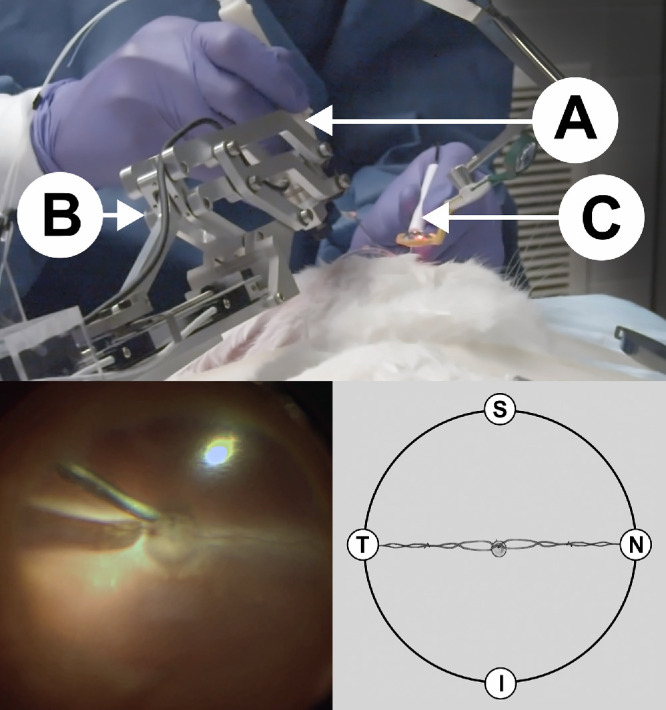
Top: Procedure using robotic assistance (A) force sensing instrument; (B) robot end-effector; (C) light pipe). Bottom left: Rabbit fundus viewing during intraocular movements. Bottom right: Schematic viewing of directions according to the optic disk (center) and vessels; S = superior (close to the user); T = temporal (close to the robot); I = inferior (away from the user); N = nasal (away from the robot).