
Figure 3.
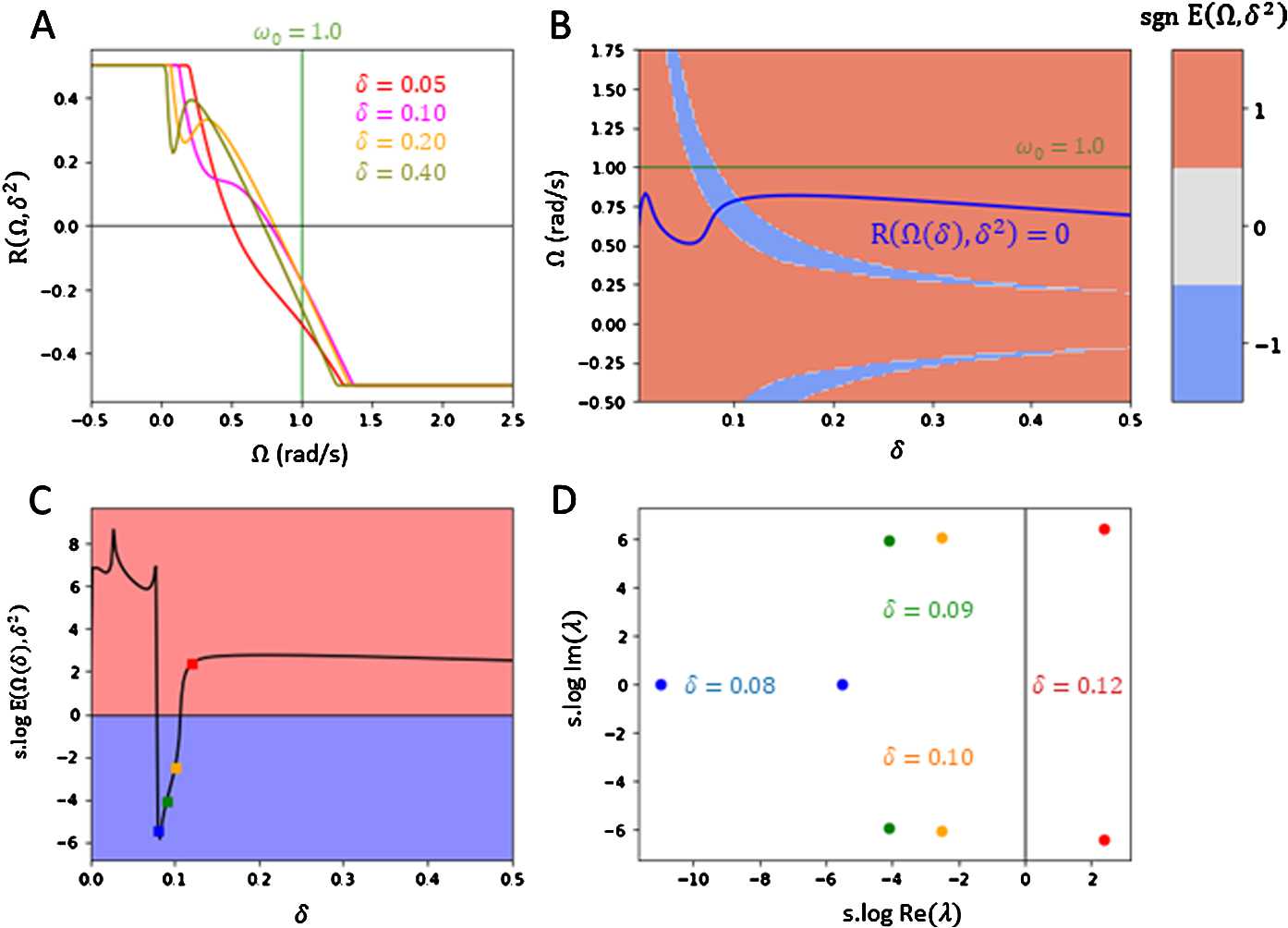
Theoretical stability plots for large N-dim oscillator system. A. Plots of error function with varying fixed over . The function is truncated between interval for visibility. There is a unique root for each fixed . B. Colour map of over states , along with the implicit solution curve (purple) parametrizing level set . Stable regions correspond to (blue) and unstable regions correspond to (red). The network synchronizes near a state overlapping the stable region. C. Plot of stability term along the solution curve over . There is a small interval for which is in the stable region (blue). Other states are in the unstable region (red). D. Complex plot of non-zero eigenvalues of on solution states across varying , scaled by s.log for visibility. The eigenvalues in plot D were computed at respective states in plot C indicated by the same colour. Power terms for polynomial were computed up to degree . The parameters used for all plots are , , , , and