
Figure 3.
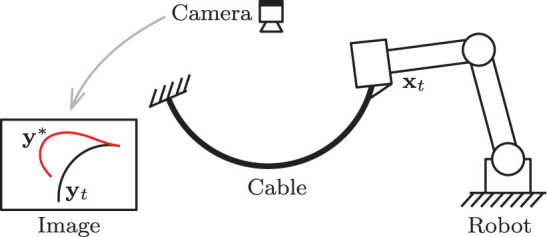
Representation of the cable manipulation case of study, where a vision sensor continuously measures the cable's feedback shape yt, which must be actively deformed toward y*.
Official websites use .gov
A
.gov website belongs to an official
government organization in the United States.
Secure .gov websites use HTTPS
A lock (
) or https:// means you've safely
connected to the .gov website. Share sensitive
information only on official, secure websites.
Representation of the cable manipulation case of study, where a vision sensor continuously measures the cable's feedback shape yt, which must be actively deformed toward y*.