
Figure 2:
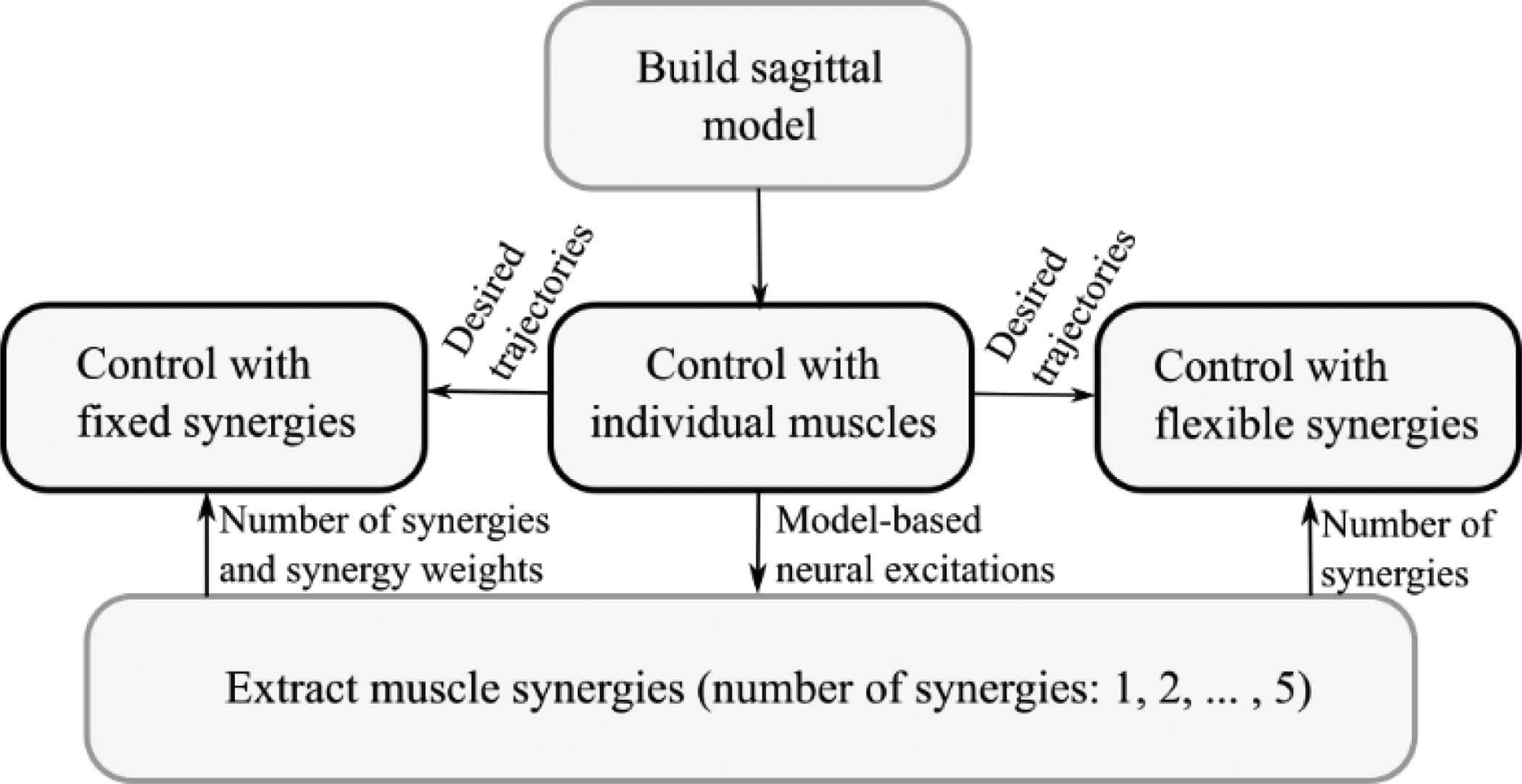
Study design and sequence of methods used in this research. First, we implemented a sagittal-plane model of walking and then performed individual muscle control to simulate an unimpaired gait and compute the model-based neural excitations. The NNMF algorithm was used to extract muscle synergies from the model-based neural excitations. These synergies were used in the synergy-based controllers to simulate the unimpaired gait pattern predicted by individual muscle control. In control with fixed synergies, both the number of synergies and their weights were embedded in the controller, while in control with flexible synergies, only the number of synergies was used.