
Fig. 1. Artificial magnetic cilia with programmable nonreciprocal motions and metachronal waves.
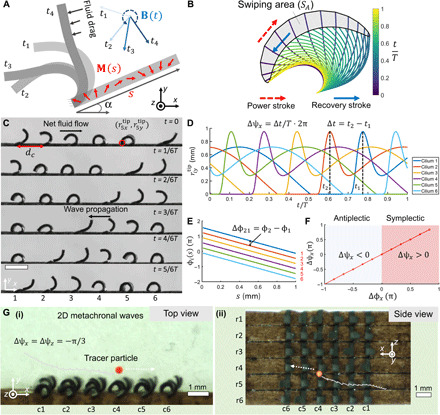
(A) Schematics of 2D rotational buckling motion of a ferromagnetic-elastic cilium (sheet). M(s), cilium magnetization profile; B(t), external rotating magnetic field; s ∈ [0, L], material coordinate in the cilium length direction (L = 1 mm); α, cilium initial body angle. (B) Illustration of ciliary nonreciprocal dynamics obtained by numerical simulation. SA represents the swiping area of the cilium tip within a beating cycle T. (C) Video snapshots of an artificial cilia array with metachronal waves pumping viscous fluids (glycerol). B(t): frequency f = 1 Hz and magnitude Bm = 38 mT. (D) Illustration of metachronal waves by the shifts in (i = 1 to 6) obtained by numerical simulation. (E) The magnetization phase profiles ϕ(s) for the cilia in (C) and (D). The neighboring cilia have the same constant magnitude in their M(s). (F) The linear mapping from Δϕx to Δψx in the metachronal waves. (G) Snapshots and overlapped trajectories of transporting neutrally buoyant particles by an artificial cilia carpet with 2D metachronal waves. (i), top view; (ii), side view. In (G), B(t): f = 2.5 Hz and Bm= 40 mT. Scale bars, 1 mm. Photo credit: Xiaoguang Dong, Max Planck Institute for Intelligent Systems.