
Figure 1:
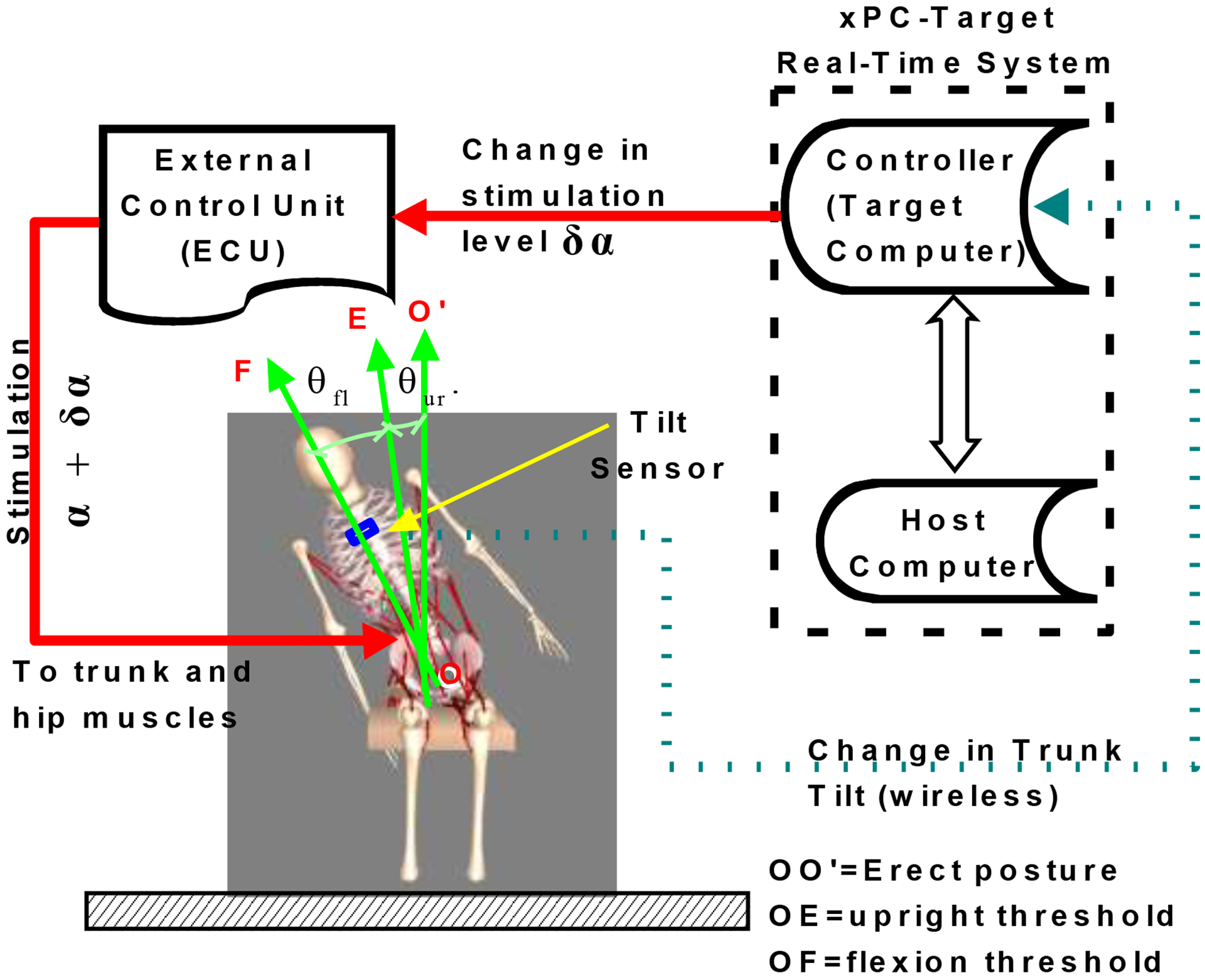
Schematic of trunk self-righting control system showing subject seated in work volume of motion capture cameras. Two computers, target and host, manage the real-time environment for the experiments. Green arrow OO’ represents erect pose. Settings for the thresholds are defined by green arrows OE (angle θur) for the upright and OF (angle θfl) for the flexion. Experiments were conducted with trunk tilt in the sagittal and coronal planes. The ECU controlled the delivery of stimulation to the implanted electrodes, which was modulated in real-time depending on the signal from the tilt sensor in the MATLAB xPC host-target environment.