
Figure 1.
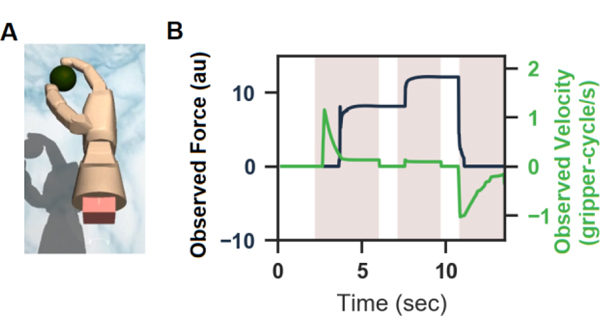
(A) Visualization of the VR gripper in the MuJoCo environment. (B) Grasp force in arbitrary units (au) (black) and grasp velocity (green) observed by the participant during trials used to train the decoder. Shaded time intervals indicate data used for decoder calibration.