
Figure 1.
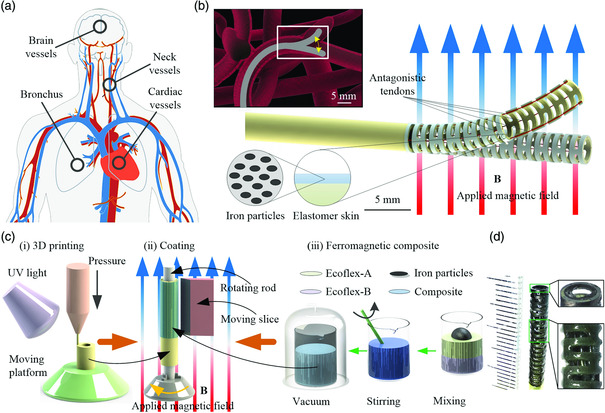
Illustration of small‐scale soft continuum robot design with hybrid magnetic‐ and tendon‐driven mode. a) Pathologic areas across the human body hard to reach, where small‐scale soft steering robots can present their superiority. b) Illustration of steering ability of a small‐scale soft continuum robot catheter passing through a complex constrained vascular environment. The enlarged schematic of the magnetic‐ and tendon‐driven soft continuum robot with an elastomer skin grown onto the hollow skeleton. The elastomer skin consists of silicone rubber embedded with evenly rearranged iron particles. c) The schematic illustration of the fabrication process for the soft continuum robot. (i) The micro‐3D printing process by which the detailed structure of the catheter skeleton is fabricated. (ii) The illustration of the coating process. The ferromagnetic elastomer skin is brushed onto the outer surface of the continuum robot and rearranged under external applied magnetic field B. (iii) The procedures of making ferromagnetic elastomer skin which consists of silicone rubber (Ecoflex) and microiron particles with a prescribed mass fraction. d) The optical image of the fabricated soft continuum robot. The spacing here represents 1 mm.