
Figure 2.
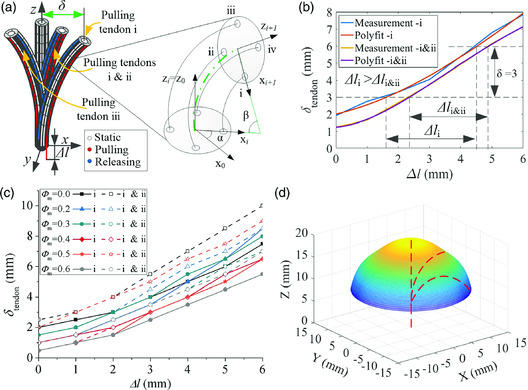
Properties of the soft continuum robot under the tendon‐driven mechanism. a) Sketch of the different postures of robots against varied tendon‐driven strategies. The enlarged part represents the theoretical model of the continuous single joint of the catheter, established using the PCCA model. The characters i, ii, iii, and iv represent the corresponding tendon. b) The deflection of catheter tip against tendon's elongation obtained from both experimental measurement and analytic curve fitting when the robot is actuated by single and adjacent pairs of tendons. The characters i, and i&ii denote the actuation strategy of the single‐pair and adjacent‐pair tendons, respectively. c) The experimental measurement of the catheter tip's deflection against tendon's elongation under different pull–release strategies for the varied mass fraction of iron particles. d) Prediction of workspace, obtained utilizing the structural symmetry of the catheter tip of the soft continuum robot.