
Figure 3.
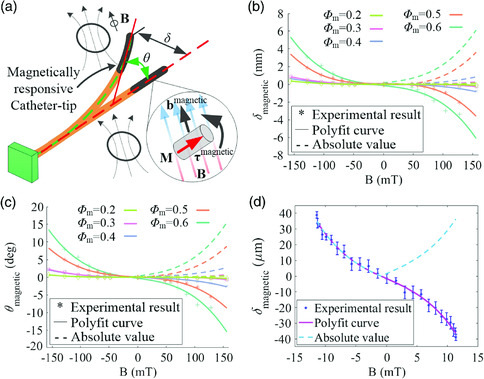
Optimal design of magnetic positioning for the soft continuum robot. a) Sketch of the proposed soft continuum robot under the actuation of an external applied magnetic field. b) Experimental measurement and the corresponding curve fitting of the deflection against the magnitude of the applied magnetic field, the catheter tip‐grown elastomer skin embedded with a different iron particles of different mass fractions. c) Experimental measurement and the corresponding curve fitting for the actuation angle against the magnitude of the applied magnetic field, the catheter tip‐grown elastomer skin embedded with different iron particles of mass fraction. d) Experimental measurement and the corresponding curve fitting for the deflection of the catheter tip actuated by a controllable magnetic field. The robot tested in this experiment owns the mass fraction of 0.6 for iron particles.