
Figure 5.
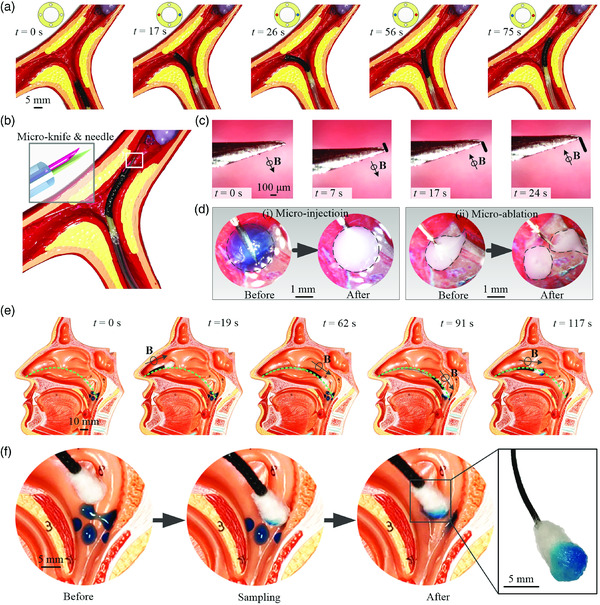
Demonstration of manipulation within the vessel model and the process of nasopharyngeal sampling. a) Demonstration process of active steering within a vessel model of the proposed soft continuum robot under the tendon‐driven mechanism. b) Schematic illustration of the soft continuum robot that approached pathology area within vessels, with a microscale knife and needle incorporated inside the robot. c) The experimental trajectory of the catheter tip under magnetic actuation. d) The potential application of micromanipulation as target therapy, including (i) microinjection and (ii) microablation. e) Experimental process of nasopharyngeal sampling within the nasal cavity, with a swab incorporated in the proposed soft continuum robot. f) The enlarged demonstration of the swab tip during the sampling process. Detailed dimensions of the demonstration setup are available in the supplemental material (Figure S4, Supporting Information).