
Figure 7.
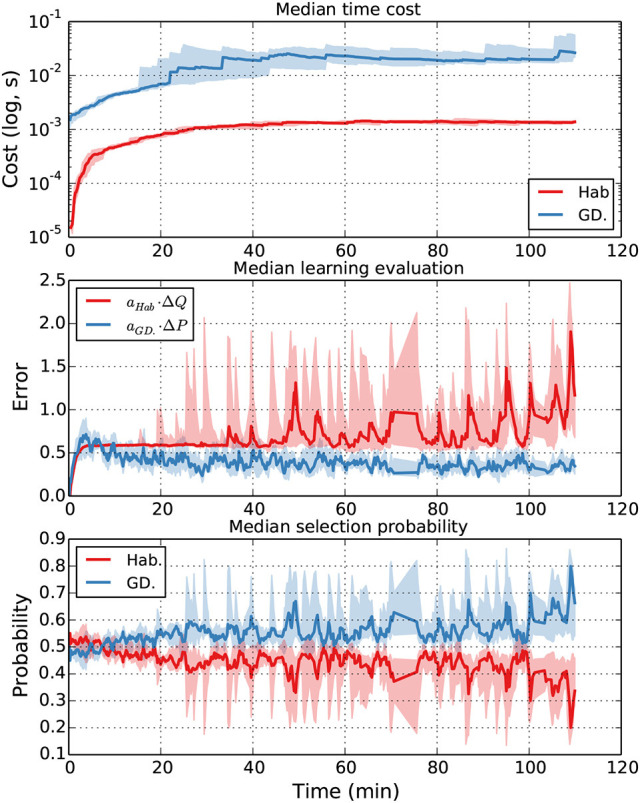
Evolution of monitored signals when both experts are controlling the robot during the navigation task. (Top row) shows the sliding mean cost spent by both experts for decision-making. (Middle row) shows the measures of learning scaled by their coefficient. (Bottom row) shows the evolution of the probability of selection of each expert. In these experiments, the strong parameter of the habitual expert learning measure combined with its slow convergence favors the goal-directed selection in order to reach the goal more easily (however at a high computational cost).